
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
The Lunar Lander GN&C System provides end to end control of a lunar mission. Its core control algorithm is based on the flight-provend Cakrawart-1 stationkeeping system designed by Princeton Satellite Systems.
The attitude control software and orbit determination systems use an Unscented Kalman Filter (UKF), also known as a sigma-point filter, for attitude determination. It can incorporate star camera measurements, and sun sensor measurements making it very robust.
The orbit determination system uses measurements of Earth Chordwidth and Moon chordwidth and angles between the linar and Earth vectors and stars for navigation.
The attitude control system uses pulsewidth modulation of its thrusters for 3-axis control. Torque demand is converted to thrusters pulsewidth demand using linear programming. Minimum pulsewidth limitations are compensated for by the algorithms.
The control software will run on any computer and can use almost any available hardware. We are developing new actuators and sensors to take full advantage of the PACS software.
The following movie is a simulation of an attitude maneuver. It also shows how to add models to the simulation. Lunar Lander attitude maneuver.
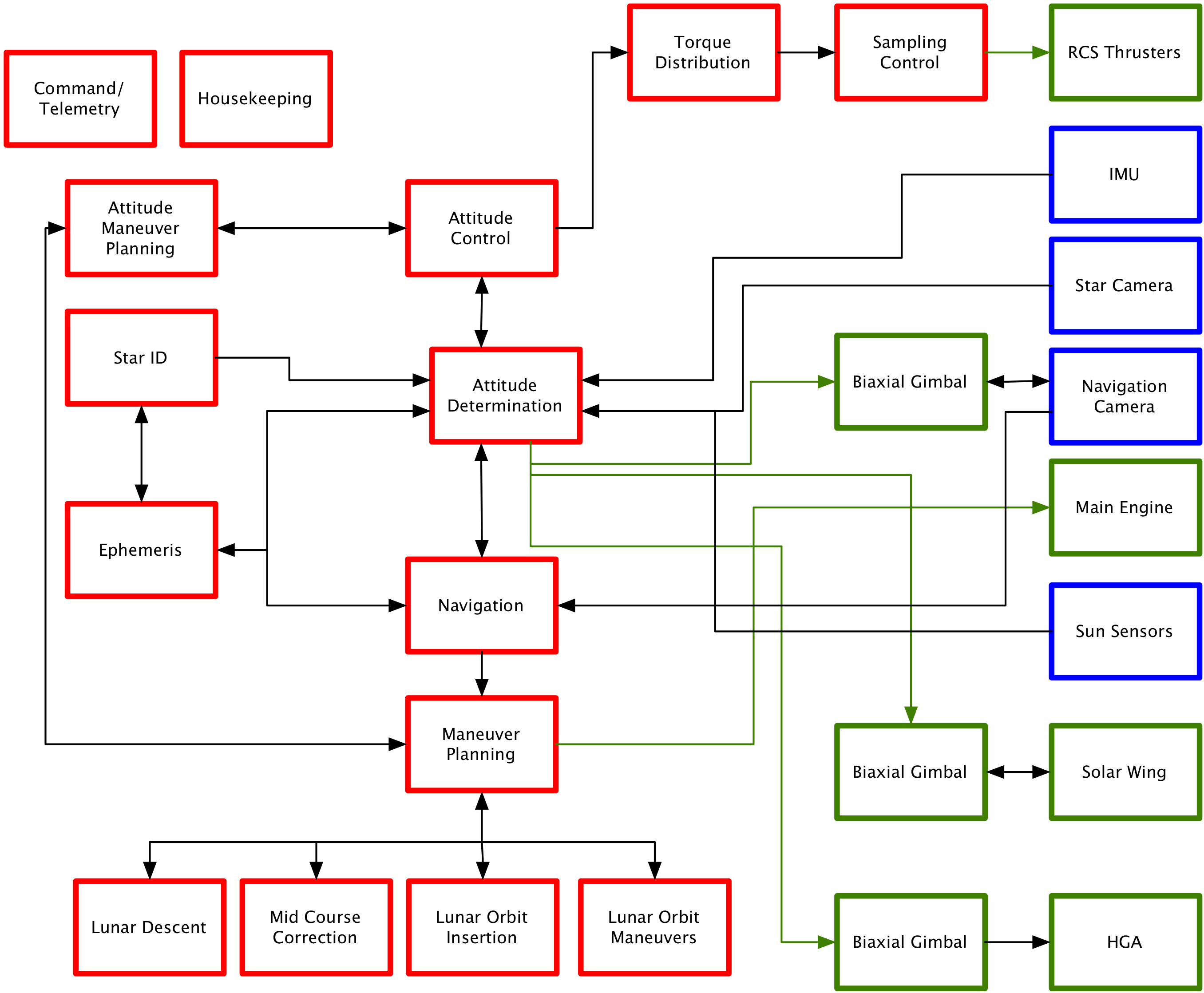
The following figure shows the Lunar Lander ACS system
The following movie is a simulation of an attitude maneuver. It also shows how to add models to the simulation.
Our blog has several entries on Lunar Lander GN&C.