
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
The Precision Attitude Control System (PACS) provides a high pointing accuracy optical navigation software for attitude control and determination. Momentum control can be performed with thrusters or, while in Earth's orbit, achieved by magnetic torquers. The attitude determination software is configured for a star camera with an Inertial Measurement Unit (IMU). The system provides high precision star centroiding to reduce centroiding errors by orders of magnitude from other systems.
The attitude control software uses an Unscented Kalman Filter (UKF), also known as a sigma-point filter, for attitude determination. It can incorporate star camera measurements, magnetometer measurements, sun and Earth sensor output, making it very robust.
The orbit determination system uses GPS measurements and two way range measurements from users on the ground. This improves positional knowledge with respect to customers on the ground. This also uses the UKF with nonlinear measurement and dynamics models.
The attitude control system can mix reaction wheel, magnetic torquer pulses and thruster pulses for 3-axis control. This makes the system extremely tolerant to actuator failures. This was demonstrated for NASA in our response to an RFI for Kepler control with only two reaction wheels. No software updates are needed to handle any combination of actuators. This can also be used for high altitude aircraft to mix aerodynamics surfaces and a reaction control system.
The control software will run on any computer and can used almost any available hardware. We are developing new actuators and sensors to take full advantage of the PACS software. For more information you can read our Precision ACS brochure here.
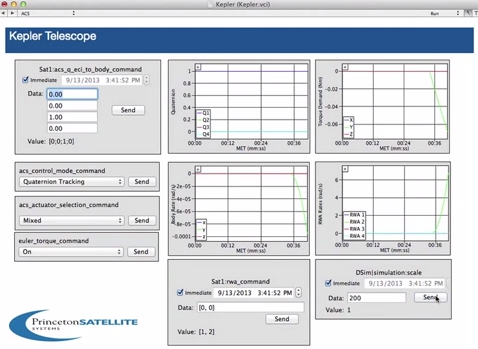
The following figure shows the Precision ACS system being used to maneuver the Kepler Telescope with mixed thruster control
The following movie is a demo in which we showcase using the asteroid prospector simulation, in which a small spacecraft is maneuvering near an asteroid.