
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
Our in-house software expertise spans a number of areas where we can put our experience to work for you. We developed the flight software for the Indostar-1 spacecraft and wrote the algorithm description document for the TDRS spacecraft. We also developed the algorithms for the collision avoidance system for the PRISMA rendezvous robots and delivered the software in Simulink which was used by SSC to autocode the flight software.
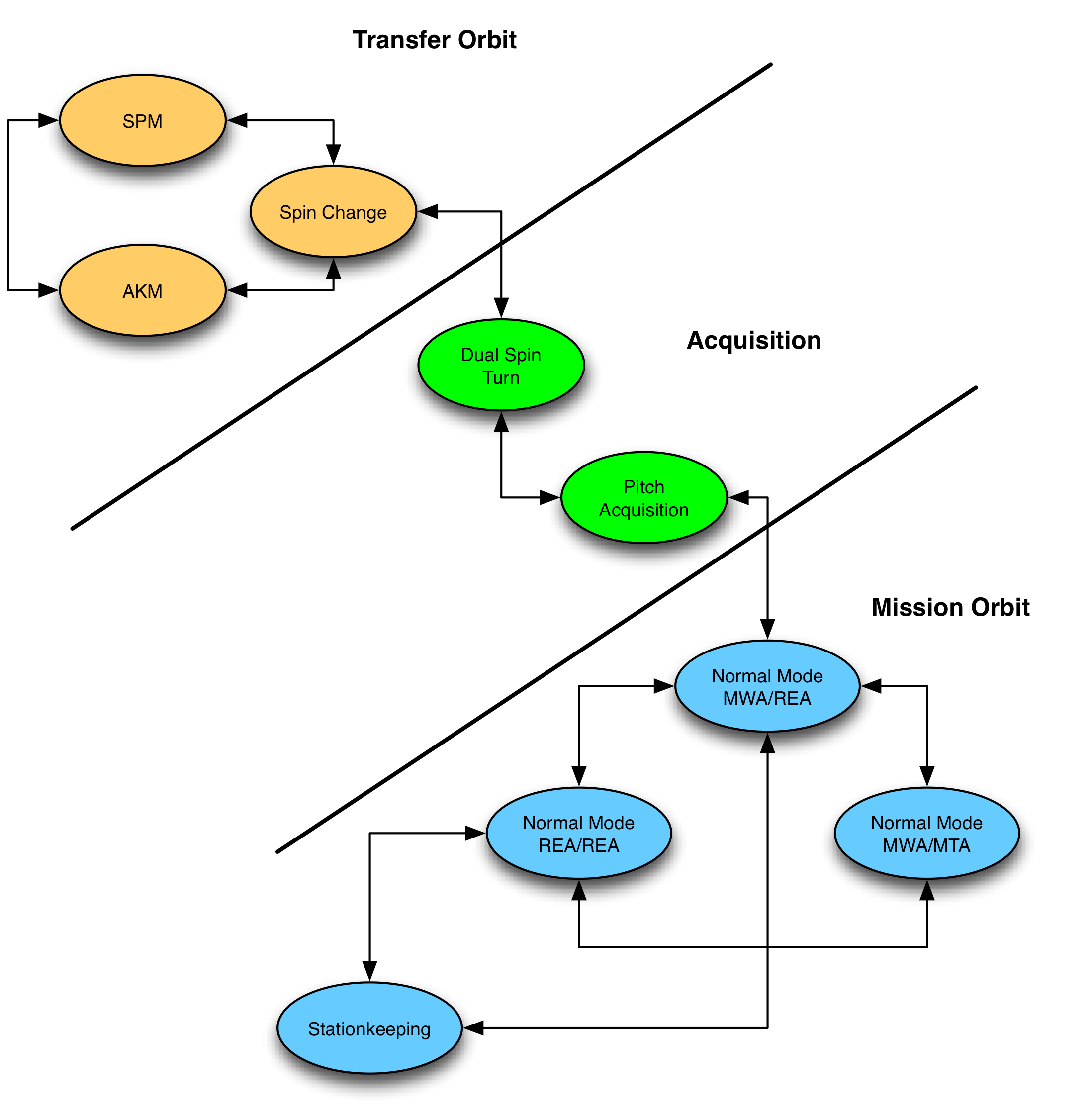
We developed the flight software for the Indostar-1 spacecraft and delivered the verification simulation. Indostar is a momentum bias spacecraft using a fixed momentum wheel. It has dual magnetic torquers for roll/yaw control and thrusters for stationkeeping. The thrusters are used for attitude control during stationkeeping. The yaw attitude is measured using a gyro during stationkeeping only. Indostar was a spinner in transfer orbit and used ground based attitude estimation software. Spin rate control and spin precession maneuvers were implemented in the flight software. The transition from transfer orbit to normal mode was done using the dual spin turn.
One unique feature of the control system is the use of the simplex algorithm to convert torque demand into pulsewidth demand. An efficient and reliable simplex algorithm was implemented in the on-board software. This version of simplex handles the magnitude limits on the pulsewidth without the need for additional constraint equations.>
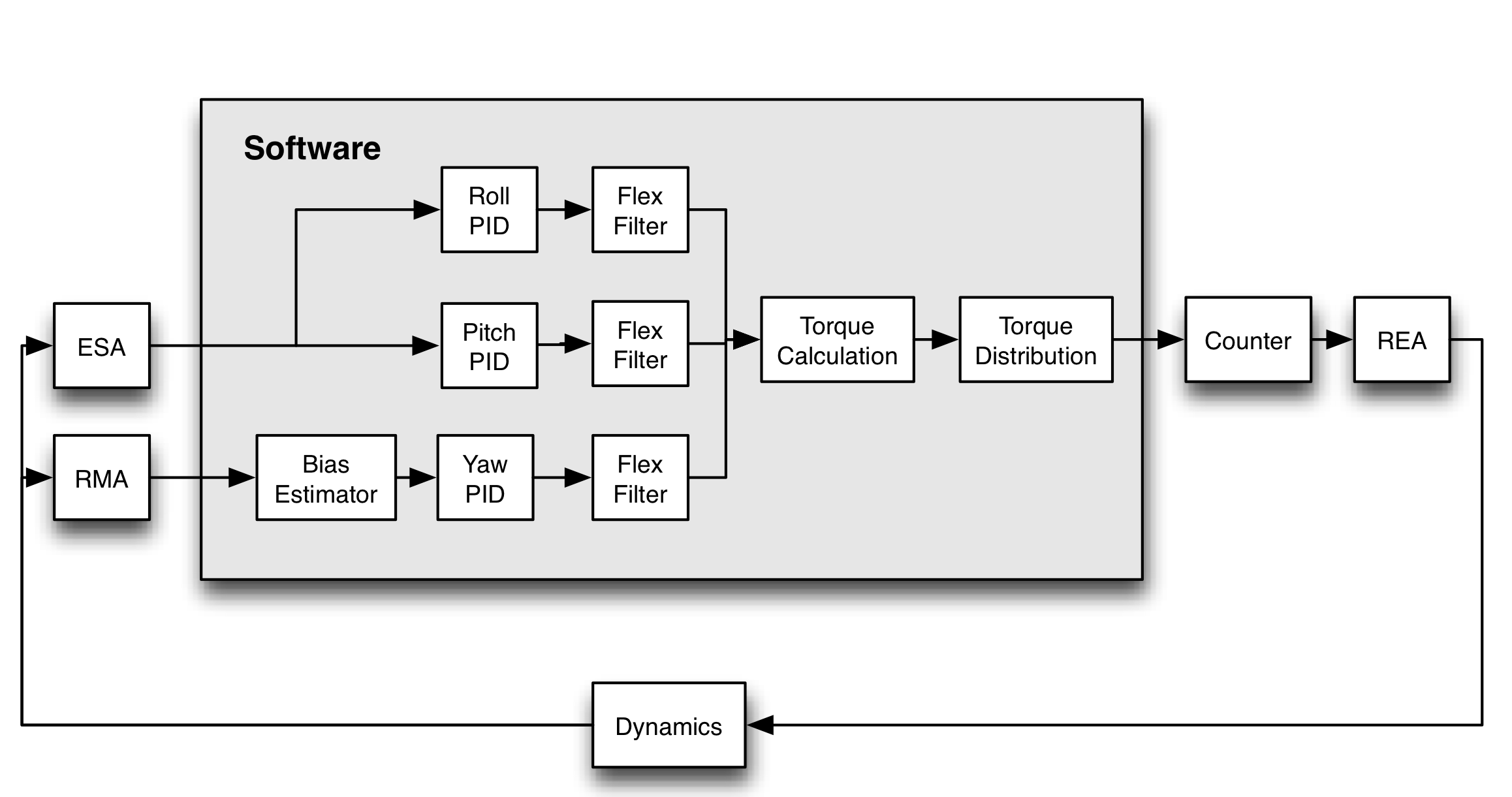
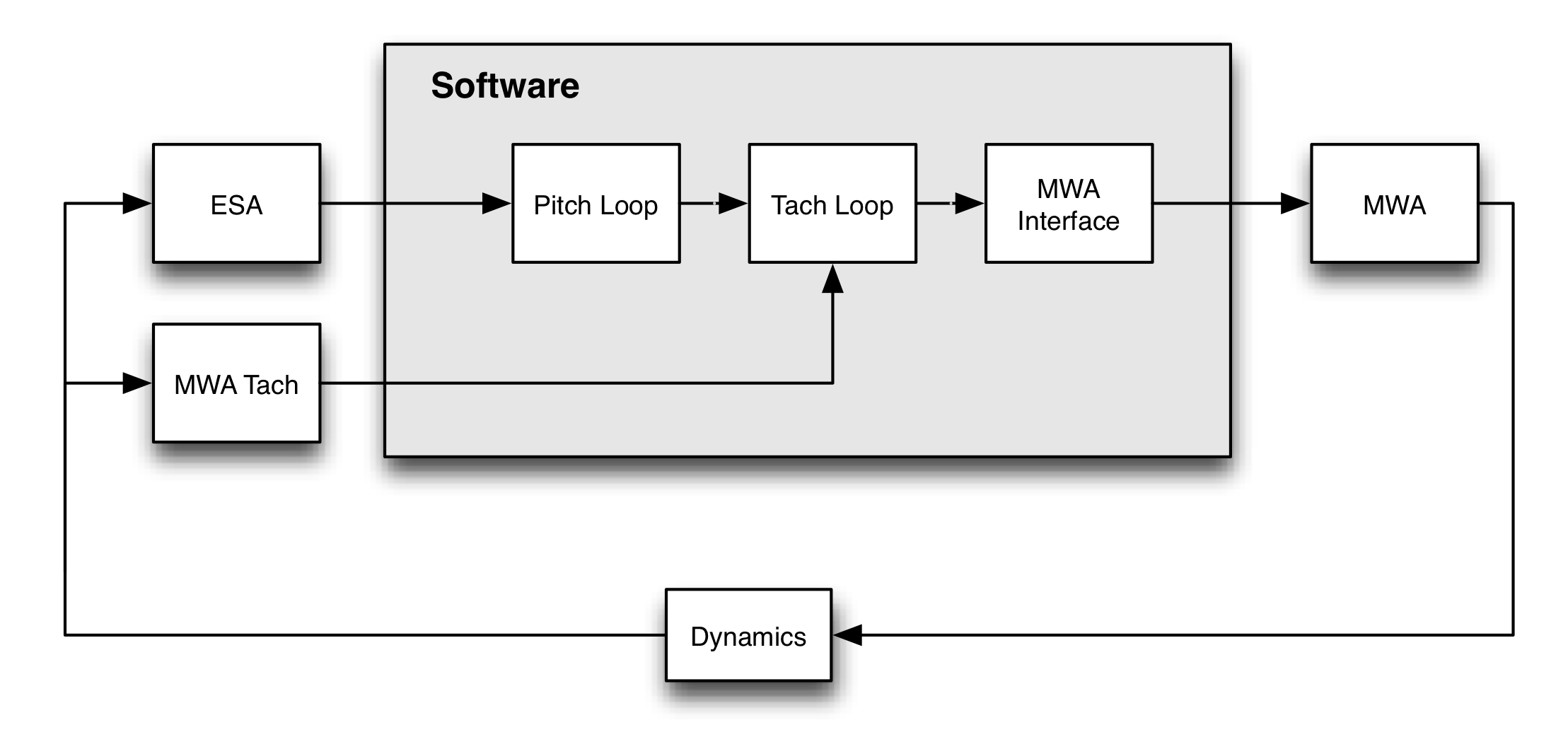
Pitch control uses the momentum wheel which is controlled using an inner rate loop. Roll and yaw are controlled using a only roll angle via a proprietary SISO roll/yaw loop controller.
PSS designed the roll/yaw momentum management system. The system uses the solar panels to produce torques. The work involved integrating designs from the Charles Stark Draper Laboratory and Hughes, testing them and writing and algorithm description document.
PSS implemented a Kalman Filter for yaw attitude estimation for the Koreasat spacecraft. A PSS engineer traveled to Korea to support installation in the real-time system. The estimator was integrated with the customer ground system.
PSS supported the testing of the GPS IIR flight software. This including software verification and test and simulation design.
PRISMA is the first space mission to exhibit sustained autonomous formation flying. The two PRISMA satellites were designed and built by the Swedish Space Corporation / OHB Sweden, with several subsystem contributions from ESA partners. PSS developed the collision avoidance algorithms and safe guidance mode under a Cooperative Research and Development Agreement. Proximity detection algorithms identify when the two spacecraft are too close and switches to the safe guidance mode. This mode is also used routinely during nominal operations to transition between formation flying experiments and when experiments are not being performed. For more information please visit the PRISMA page.
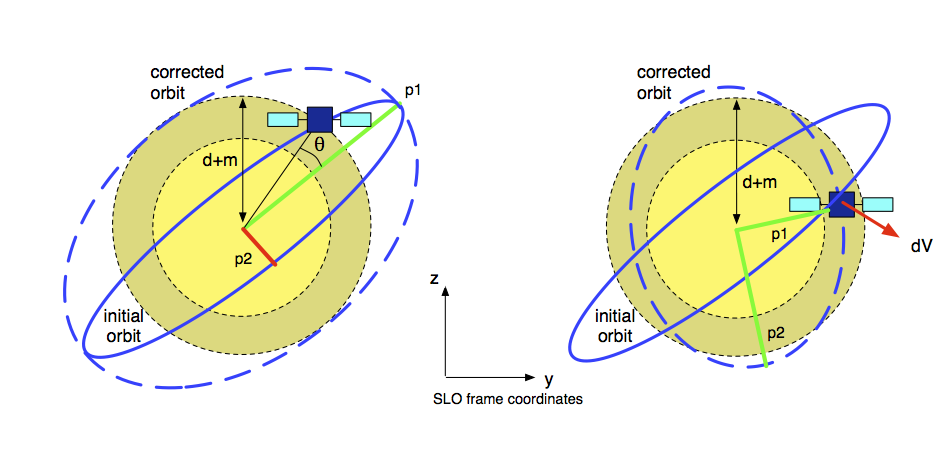
The PRISMA mission includes two spacecraft: Mango and Tango. Only Mango has thrust capabilities, and is therefore responsible for all formation flying and avoidance maneuvers. The safe guidance mode is designed to compute a series of one to four delta-v's so that Mango achieves a stable relative trajectory that is safely outside of a prescribed avoidance region around Tango. The illustration below is an example of a relative trajectory (solid blue) in the along-track / cross-track plane that intersects the (yellow) avoidance region. On the left, the spacecraft is allowed to wait until the optimal time to apply the delta-v, to minimize fuel use. On the right, the spacecraft is forced to maneuver immediately. This may be necessary if the state estimate is degrading quickly due to a failed sensor. The corrected orbits are shown in dashed lines.
For more information: Flight Software Inquiry