
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
Space navigation is still largely performed on the ground. Most commonly, tracking stations take measurements of the spacecraft and process the data. Ground-based navigation is very accurate and has been used to successfully navigate spacecraft. But it is very expensive, not robust to loss of contact, space segment degradations and other factors.
There have been some missions that have demonstrated autonomous navigation in flight. This includes NASA's DS-1 mission that performed orbit determination using optical triangulation. Reduced State Encounter Navigation (RSEN), using optical images as the sole data type, was used on DS-1 to track comet Borrelly for 2 hours through closest approach. RSEN is initialized using the last ground or onboard estimate of spacecraft state relative to the target just before commencement of the final approach phase. RSEN was also in the Stardust mission during comet Wild-2 flyby, and in the Deep Impact mission to navigate the impactor to hit an illuminated area on the comet Tempel 1 and by the flyby spacecraft to track the impact site.
The Japanese asteroid return mission Hayabusa employed wide-angle cameras for onboard navigation, in conjunction with Light radio Detecting and Ranging (LIDAR) for measurement of altitude with respect to the asteroid Itokawa. A target marker was dropped to act as a navigation aid by posing as an artificial landmark on the surface. European Space Agency's Small Missions for Advanced Research in Technology (SMART-1) mission employed the Advanced Moon Imaging Experiment (AMIE) camera for Onboard Autonomous Navigation (OBAN). The OBAN framework is also being used for designing a vision based autonomous navigation system for future manned Mars exploration missions
The Optical Navigation System (ONS) is an autonomous flexible spacecraft navigation and attitude determination system for deep space, commercial geosynchronous and planetary orbit spacecraft. It replaces the star tracker on a spacecraft with a more capable sensor.
The navigation solution is computed using an Unscented Kalman Filter (UKF) that can accept any combination of range, range-rate, planet chordwidths, angle measurements between planets or landmarks and angle measurements between stars and planetary centroids or landmarks. The UKF employs a full nonlinear orbital dynamical model including spherical harmonic and n-planet gravity and solar pressure disturbance models. Each telescope provides its own attitude solution eliminating the need for high precision gimbal angle measurements. The attitude determination system uses the same UKF with the IMU angular rate data as inputs.
The sensor includes two gimbaled telescopes, an Inertial Measurement Unit (IMU) and a processor. The system reduces navigation errors by automatically using multiple targets and by merging multiple frames of data. The navigation accuracy is limited by the ephemerides errors of the target planets. Absolute accuracies range from hundreds of meters in geosynchronous orbit to hundreds of kilometers in the region around Jupiter to thousands of kilometers in the far reaches of the solar system. During planetary or asteroid approaches the sensor switches to a relative navigation mode.
ONS can use many different measurements. The following picture shows graphically the different possibilities. The nature of the Unscented Kalman Filter makes it easy to add your own sensors.
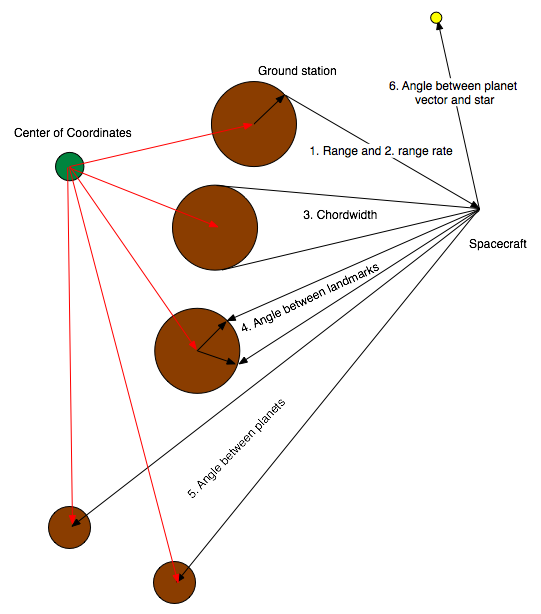
ONS handles both attitude and orbit determination. Both applications use the Unscented Kalman Filter algorithm to incorporate the measurements and compute the solution at each time.
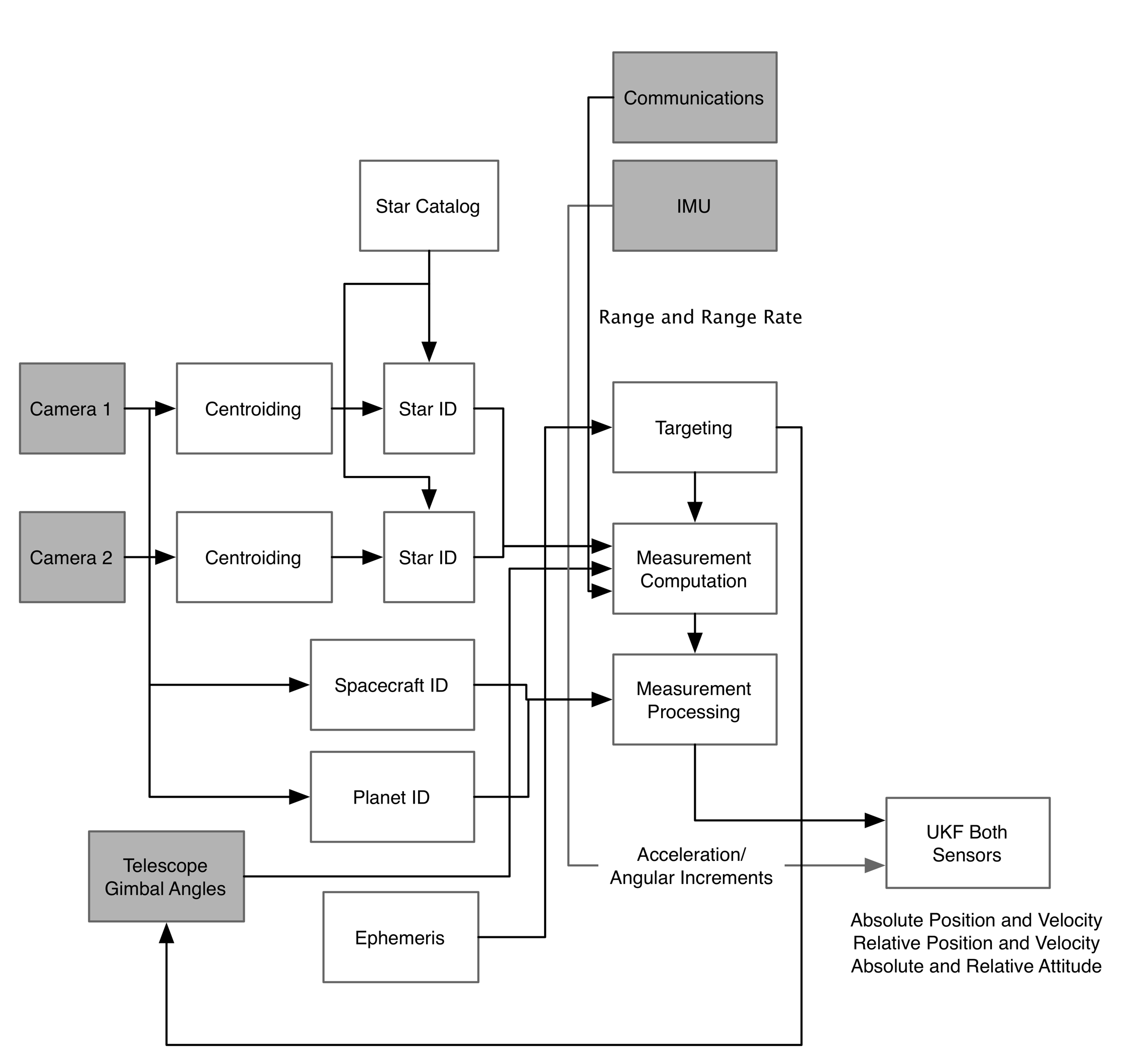
The camera frames are processed by the centroiding modules. These modules identify stars and planets on the frame. Multiple frames are examined and only those objects that appear on all frames are processed. Extended objects are cantroided using an ellipse fitting algorithm. Smaller centroids are determined using a point spread function based algorithm .
The star identification algorithm looks at angles between the points to identify stars. Objects that appear on multiple frames but cannot be identified as stars or planets are classified as spacecraft. The planet and star centroids are passed into the measurement functions which determine the errors to be fed to the Unscented Kalman Filters.
The targeting algorithm uses ephemeris information to pick new targets. The cameras are moved to new planetary targets periodically to randomize the inputs.
For navigation purposes, the IMU is used to measure accelerations on the spacecraft due to thruster firings.
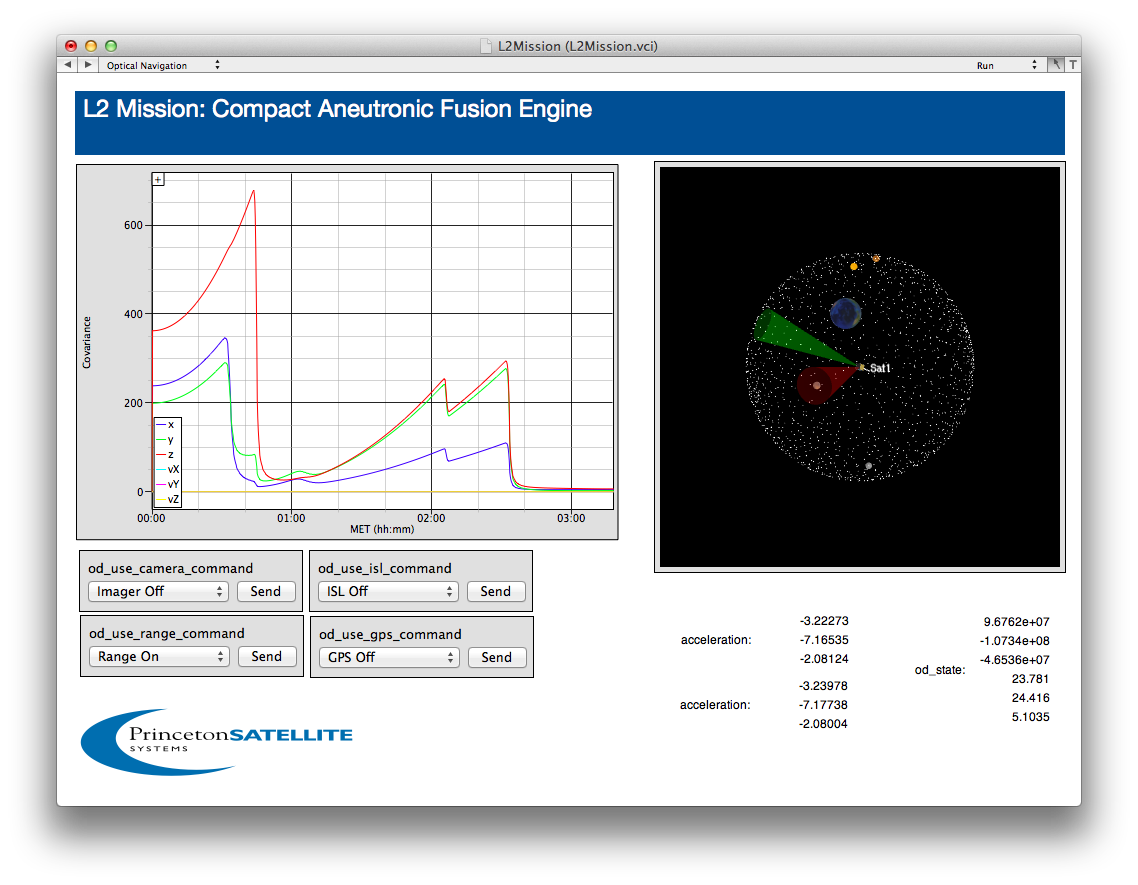
The following figure shows the covariance using only range measurements. It takes several measurements over a hour for the covariance to converge. The four pull-down menus on the left allow the user to select different combinations of measurements. The spacecraft would normally use a combination of GPS and optical measurements during the spiral out of earth orbit. All measurements are incorporated using the same Unscented Kalman Filter.
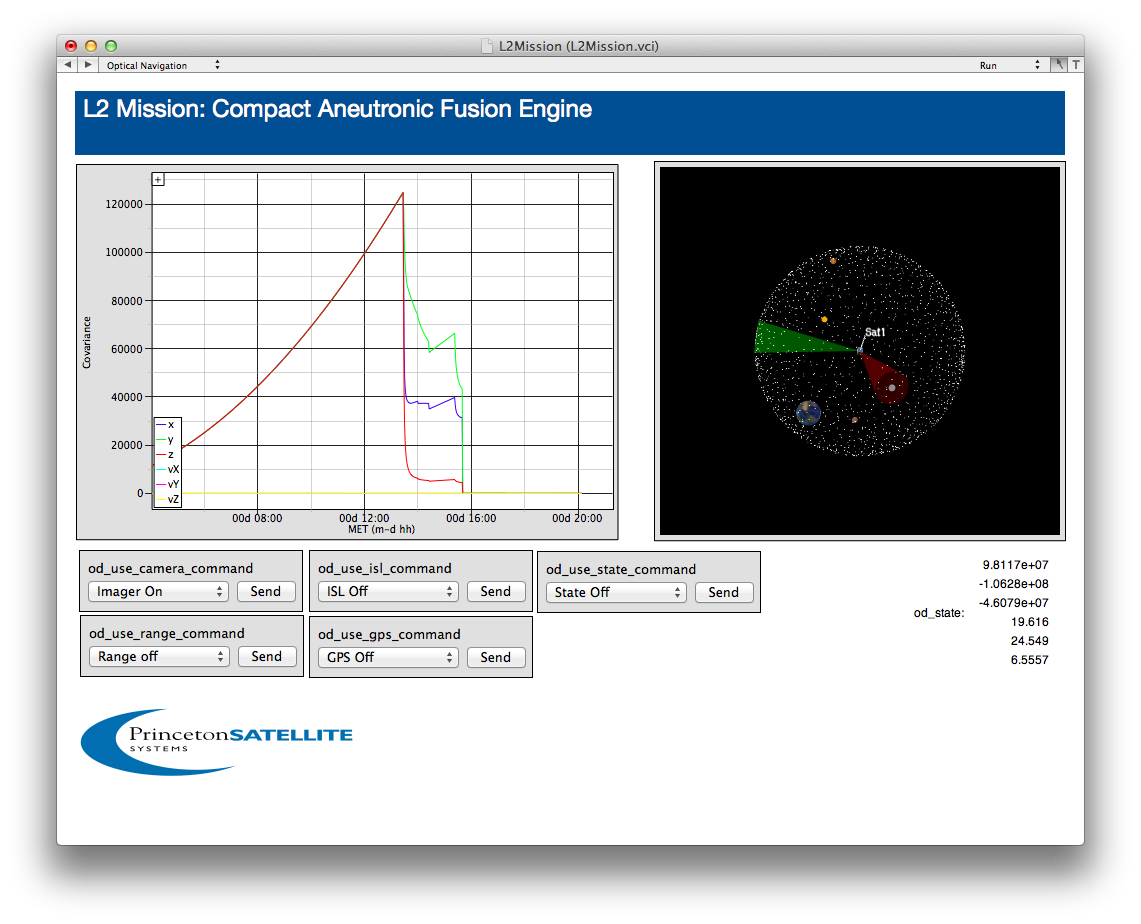
The following figure shows the covariance changes when optical tracking is enabled. The numbers for the plant covariance are very conservative. The covariance drops to 100's of km with just a few updates.
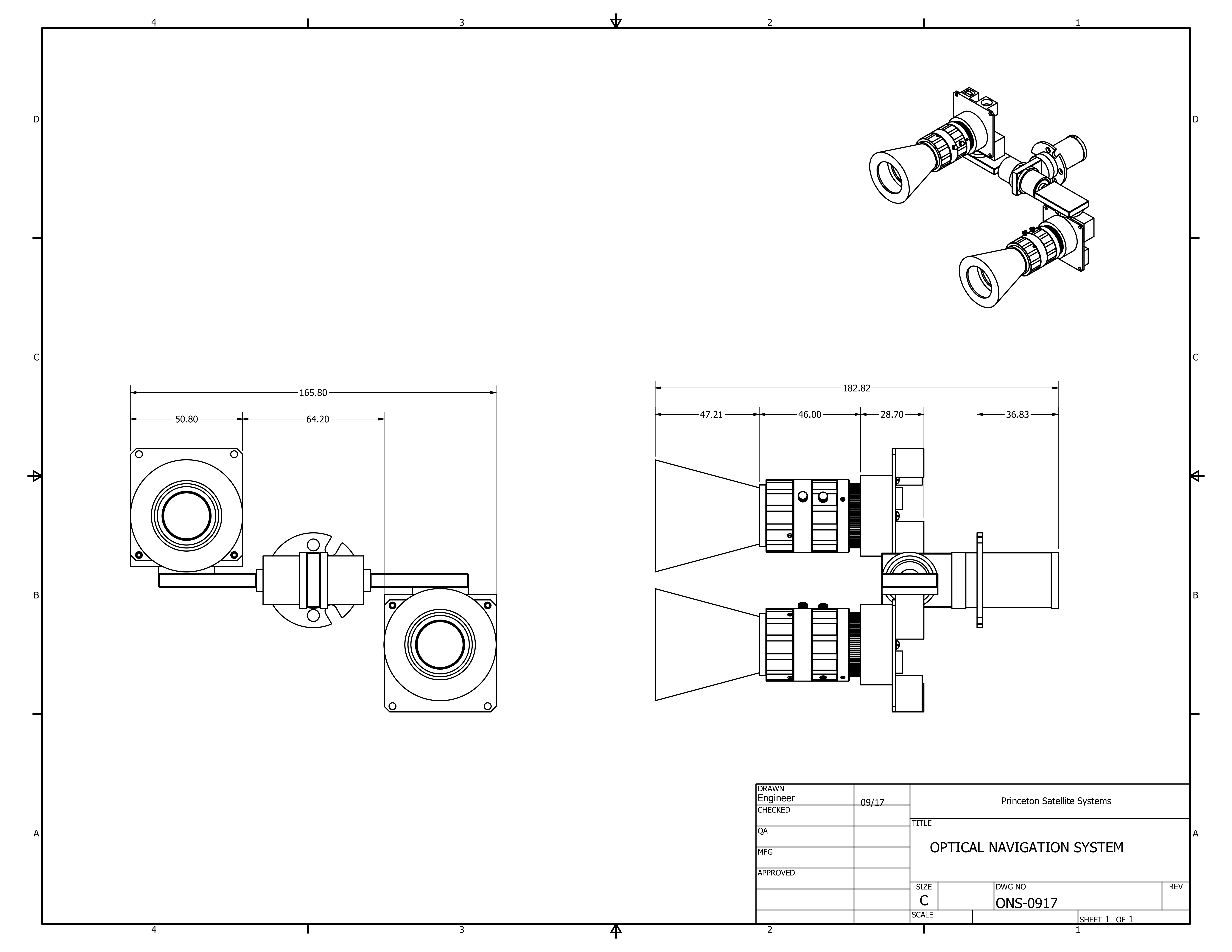
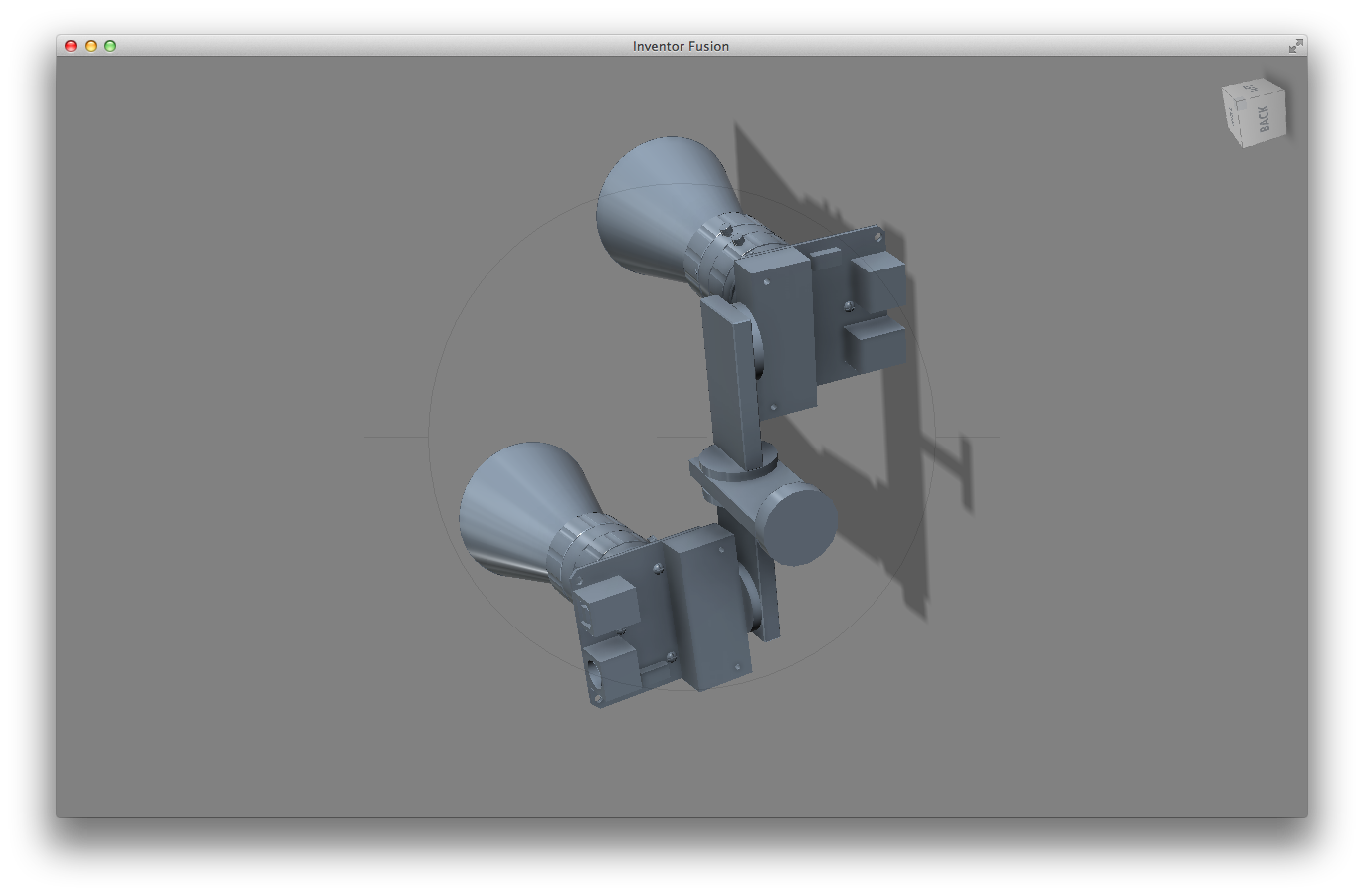
The mechanical design for the laboratory prototype of the ONS is given below. Note that the focus rings on the telescopes would not be present on the flight version.
See the movie of a deep space trajectory at Deep Space Simulation
For more information: Deep Space Navigation Inquiry. A design document is available on request