
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
A CubeSat is a miniature spacecraft with a volume of from 1 to 3 liters and a mass from 1 to 3 kg. California Polytechnic State University and Stanford University developed the CubeSat specifications to help universities worldwide perform space science and exploration. CubeSats provide an opportunity for students to learn about satellites and engineering. Most CubeSat programs reside in the universities. This program's goal is to allow junior high and high school students to work on a CubeSat project. These are the ages when children make career decisions and this project may help students decide to pursue careers in technical fields.
The goal of the club is to design and build a CubeSat to test a new CubeSat attitude control system. The club is supported by engineers from Princeton Satellite Systems. Mr. Skalka, the tech prep teacher, and Mr. Carson, a science teacher, participate.
The club looks for a 2 year commitment from students. The club runs through the full year. Sixth, seventh and eight graders participate. Many of our students are in their second year of the club!
Each year the first few lectures give students the background they need in spacecraft design, analysis and dynamics. The remaining meetings are hands on. The students develop software, create component designs in CAD packages, assemble electronics and build hardware for CubeSat testing and manufacturing.
If you want to learn more about the CubeSat Club contact Michael Paluszek or Yosef Razin at Princeton Satellite Systems.
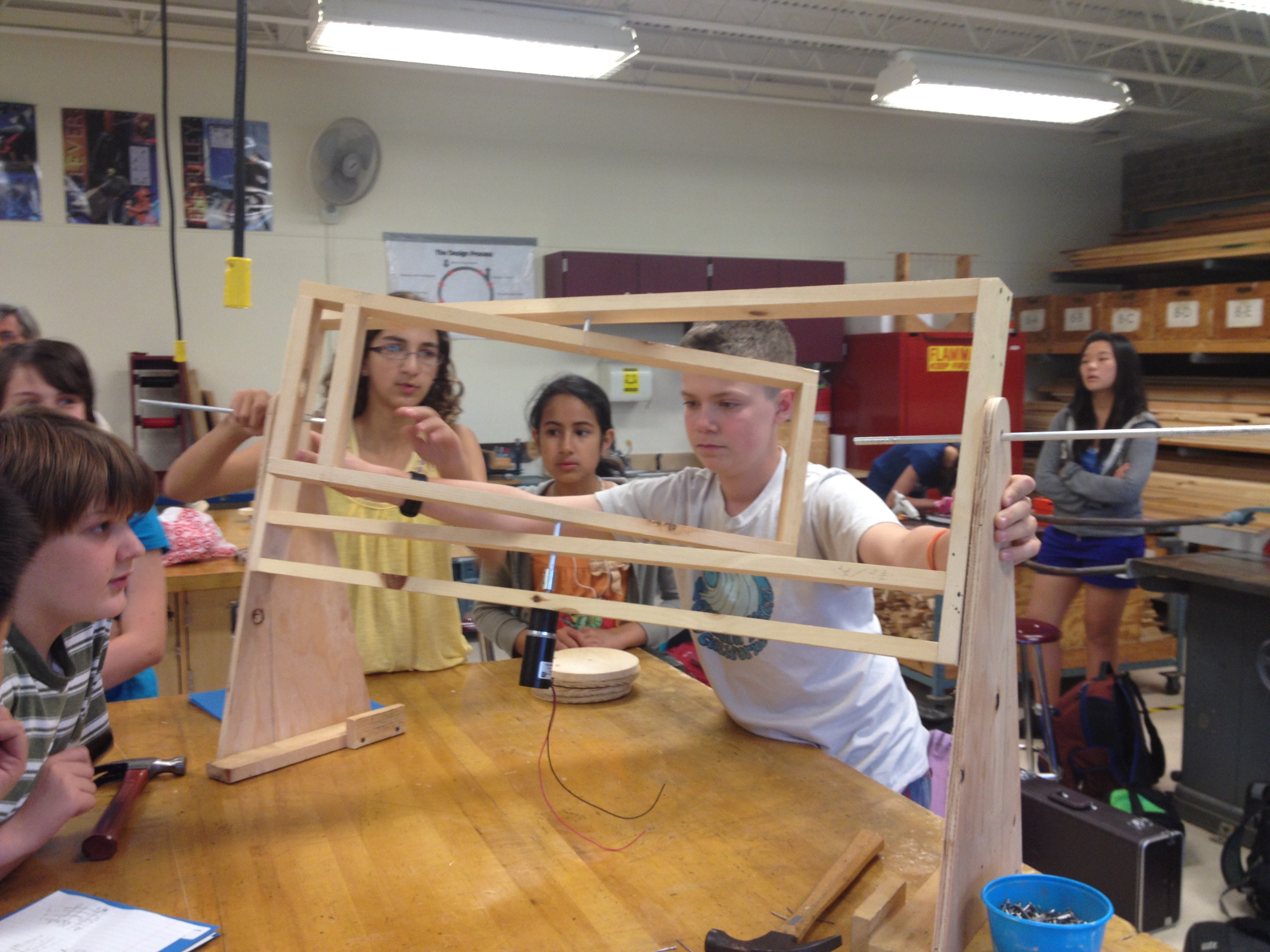
The students built and assembled the parts for their testing device.

Here the students align parts built by different subsystems.
Each subsystem gave a short presentation about their work this year and shared their design notes with the other teams.

The students listened intently and related their work and chosen specifications to those of other teams. As part of the presentations the students emphasized how their findings affected other teams.

The club then had a pizza party to celebrate their accomplishments this year!
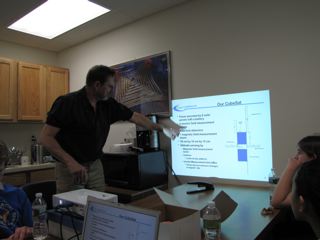
Princeton Satellite Systems was invited by the National Science Foundation to talk about the CubeSat Club. The following pictures show the meeting and Eloisa de Castro giving her talk!


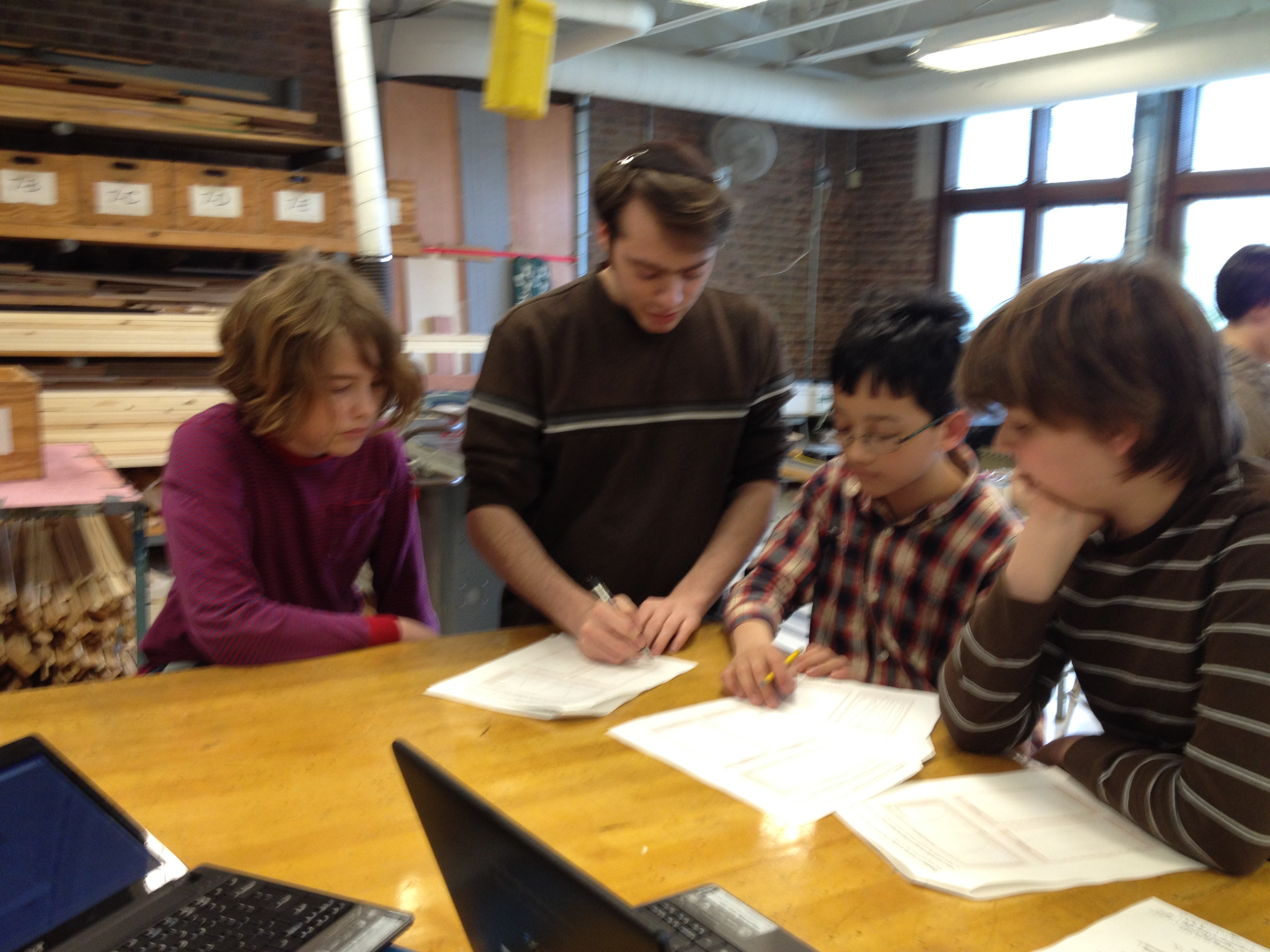
The teams met in groups to work on their subsystems
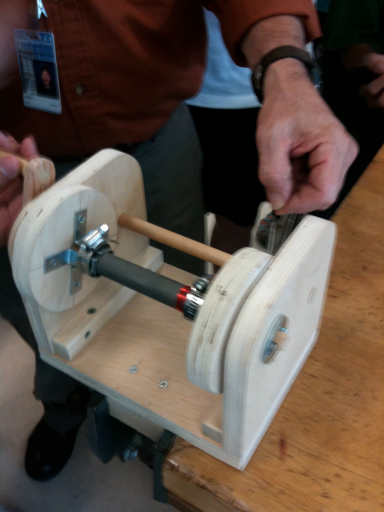
Payload built their reaction wheel testing device with Mr. Skalka.
Telemetry started working on analog and digital electronics.
Mechanisms made a 3D CAD model of the magnetic torquer design.
Power tested the power output from the solar panels.
Each group practiced their MATLAB® skills with real problems related to their subsystems. They learned the basic principles for their subsystem designs and wrote programs to solve for what their design specifications should be. They also began to choose some materials and components suitable for their subsystem specifications.
The mechanisms and telemetry groups met and worked on their subsystem designs. The telemetry group learned about signal power and the mechanisms group learned how to draw parametric models of their designs.
We also had a visit from an Bob Cenker, who orbited Earth in the Space Shuttle Columbia. The students had the chance to ask Bob plenty of questions about his experience as an astronaut and they even had a discussion about orbital mechanics. Bob drew what his orbit looked like and demonstrated how angled orbits worked with a basketball.
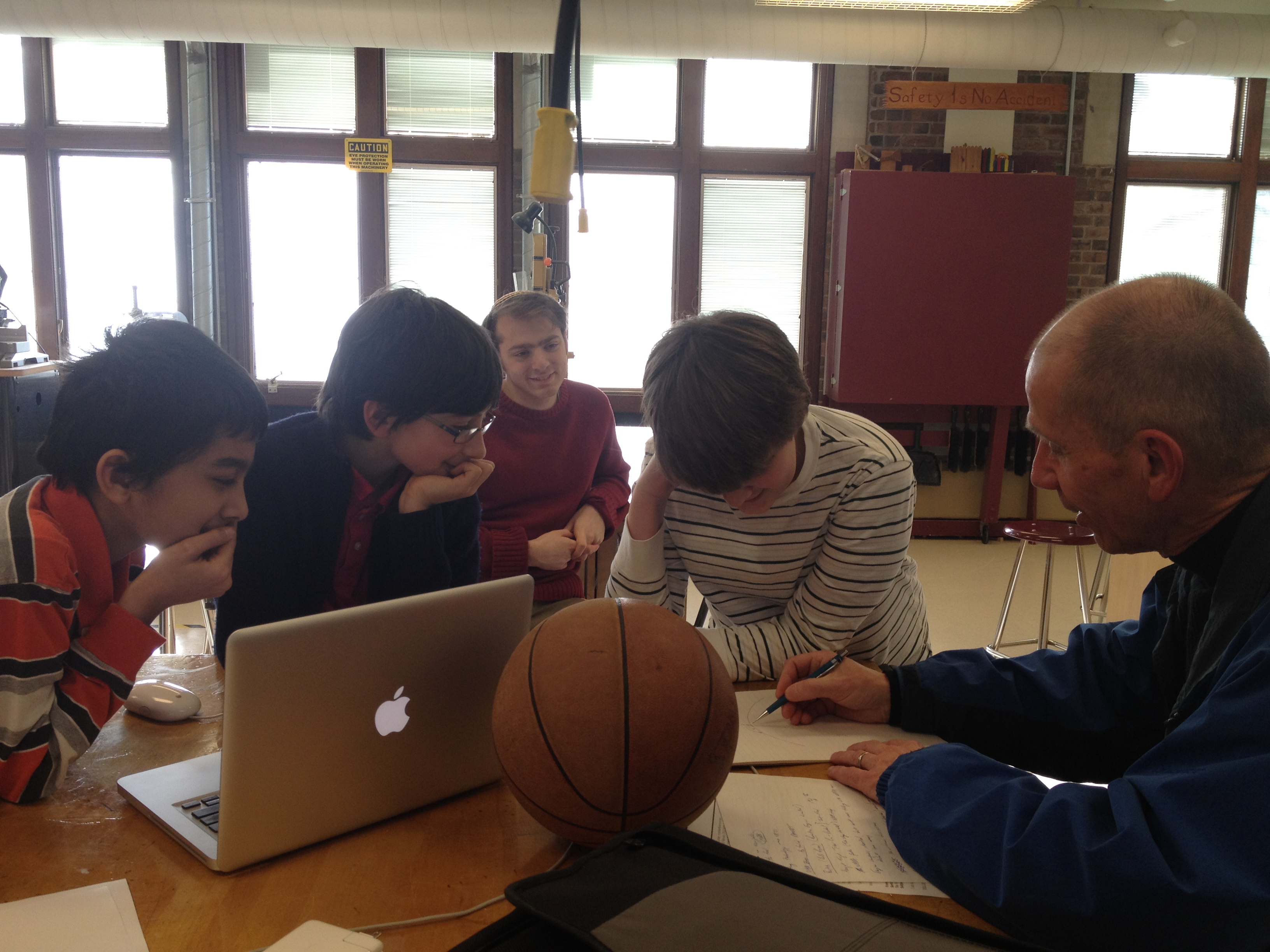
Bob also showed them some footage from his orbit where he was floating sideways and trying to catch food in his mouth at zero gravity! The students were also interested in what our planet looked like in space!
The control, payload and power groups met to begin assembling the parts to of their reaction wheel test device!
The power and mechanisms teams learned about vectors and plotting in MATLAB®.
All subsystem teams met. We learned how to use the CubeSat Toolbox this week to do simple simulations. T
This week was a continuation of introductory programming. We learned about arrays and performing calculations that involve arrays, as well as about plots. Each team built on their knowledge from last week to complete a force calculation.
Today was an introduction to MATLAB ®. We learned about using the software as an advanced calculator, then performed calculations using constants, variables and expressions. They were introduced to sample scripts and functions to illustrate the different programming concepts. Each team was given a complex shape then wrote their own scripts and functions, as well as commands that called those scripts and functions to calculate area and perimeter.
Each group learned about telescoping systems like the ones that will be on the payload and built their own telescopes.
The students continued to build the Attitude Control System testing device.
Each group learned about design decision-making. Each team wrote a layout of their subsystem and prioritized based on their budget, schedule, and performance requirements.
We learned about engineering drawings, how to make them, and how to read them. Each team was given an engineering drawing and instructed to machine that part in the wood shop based on the dimensions given in the drawings. These parts will construct the terrestrial test system for the attitude control. started building the Attitude Control System mounts and
We chose our subsystems today. Members from last year gave their personal accounts on the work they accomplished last year and got new student up to speed on our current progress.
This was the first CubeSat meeting of the year. Students were introduced to CubeSats and we went over all the roles they could play on the design team. Each student was able to ask about all of the subsystems and narrow down the one they are most interested in working on.
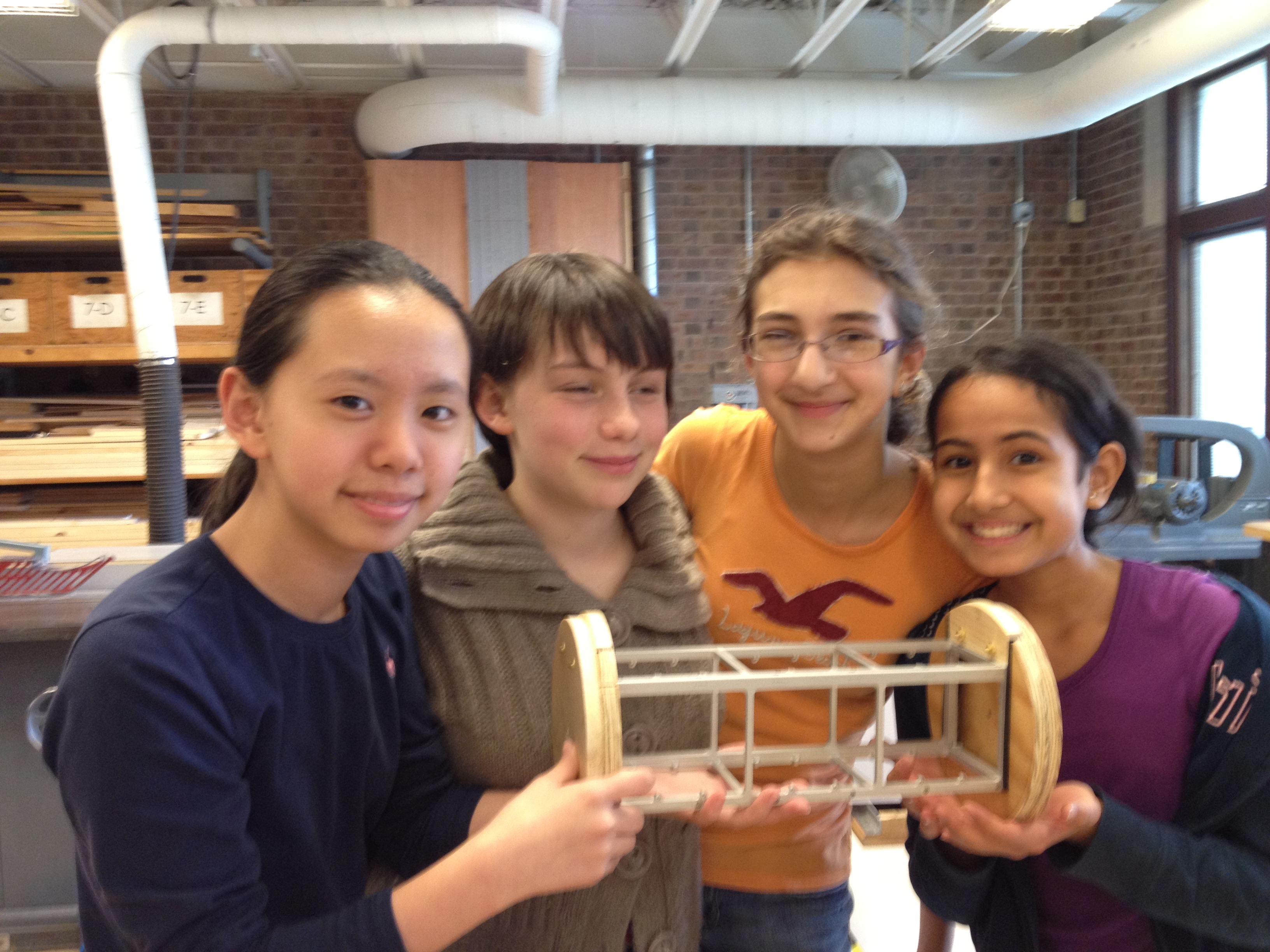
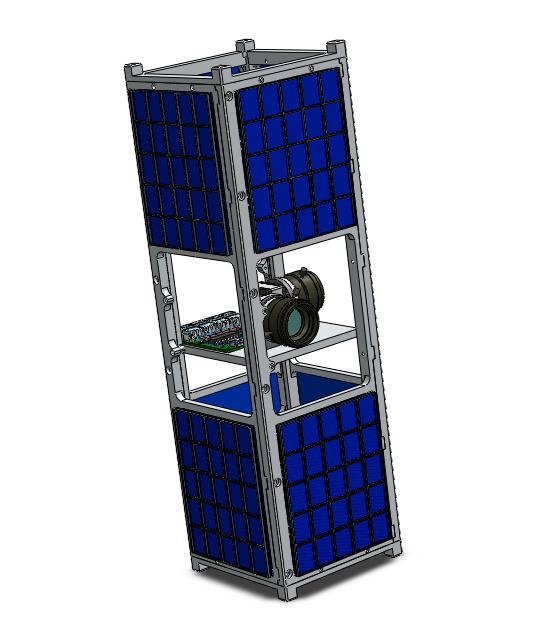
The image below shows the CubeSat club team with their products! The CubeSat frame is the flight frame and hopefully will be the first middle school satellite in space. The test rig and magnetic torquers can also be seen in the picture.
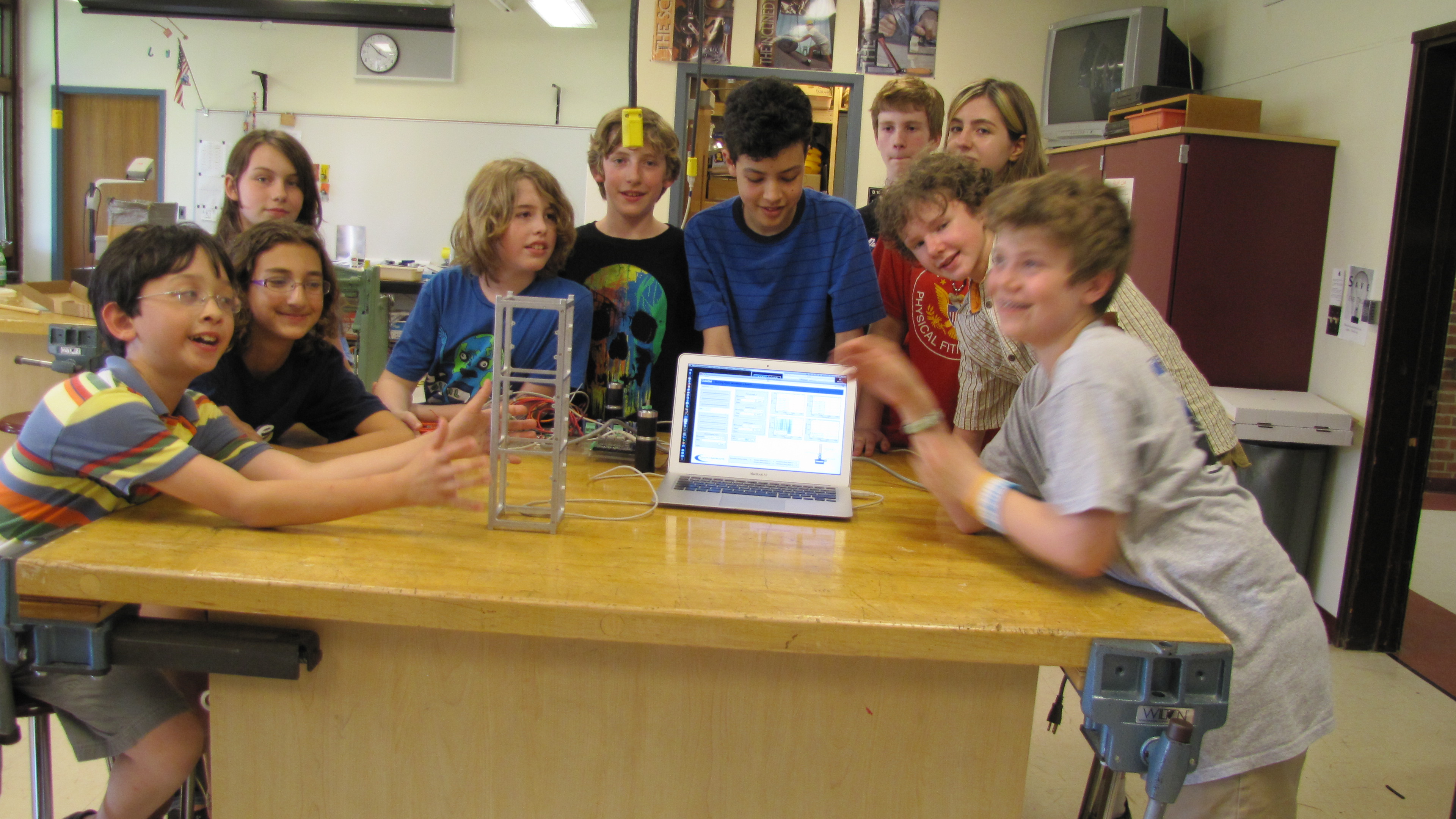
Next year our graduating 8th graders will return and new 6th graders will join the team. New students are always welcome!
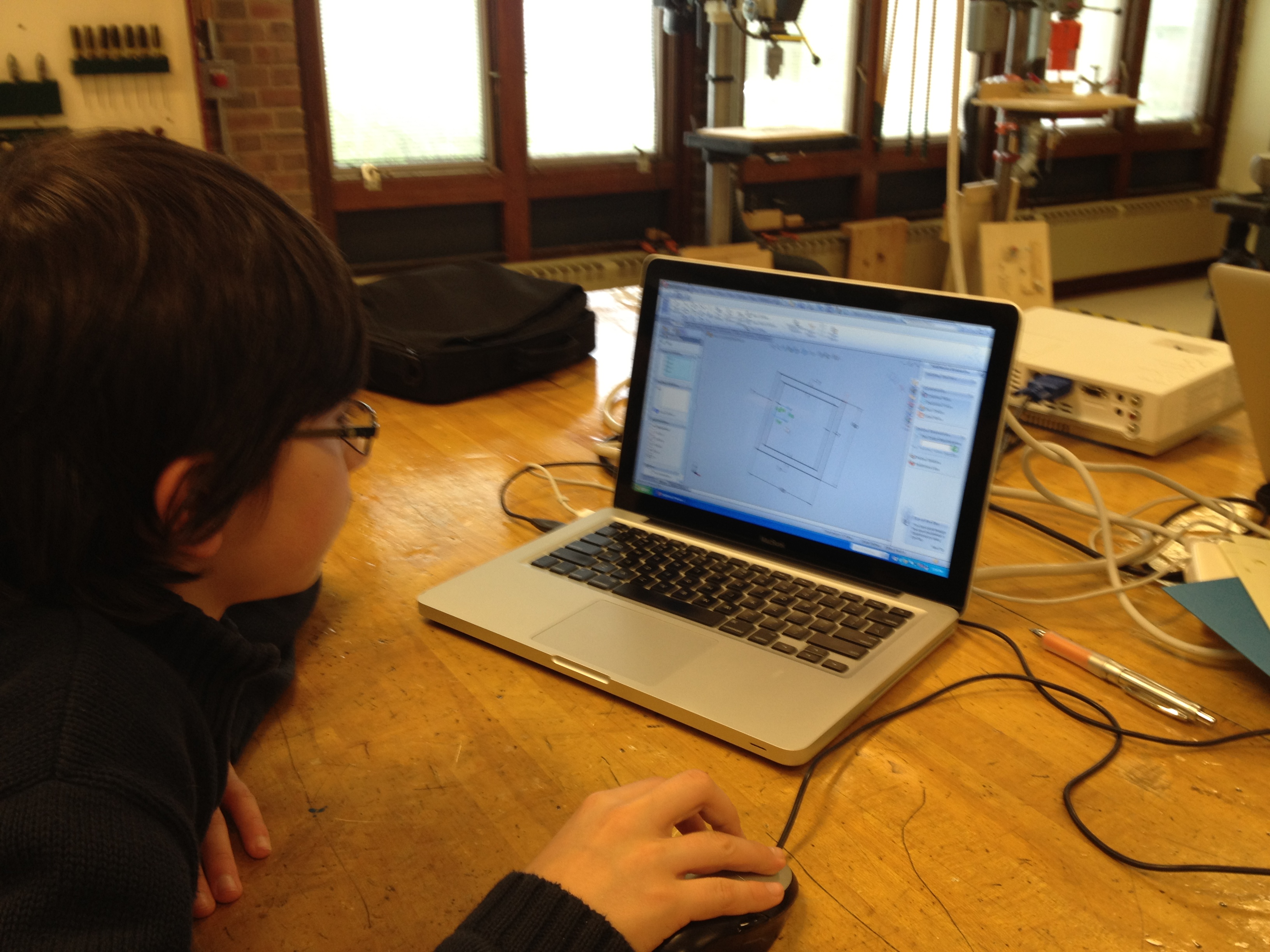
Two teams of students learned how to use the CubeSat Control Toolbox for MATLAB. Another team used SolidWorks to design elements of the test rig. A third group began assembling parts oof the test rig that had already been designed by the students under the direction of Ms. de Castro. Mr. Skalka helped with the details of the mechanical design and manufacturing.
The figure below shows the CubeSat with the orthogonal cameras that will be used for navigation and attitude determination.
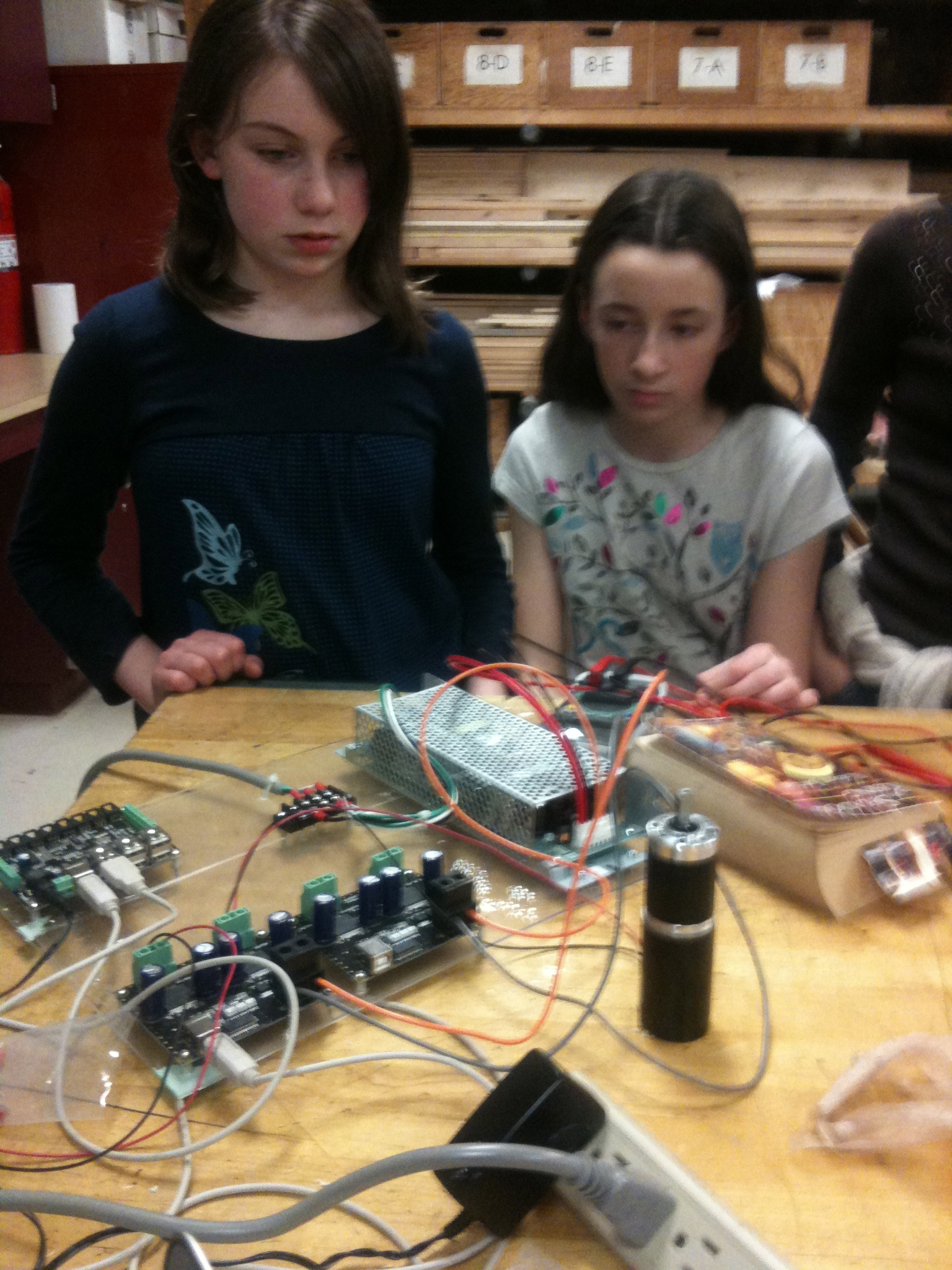
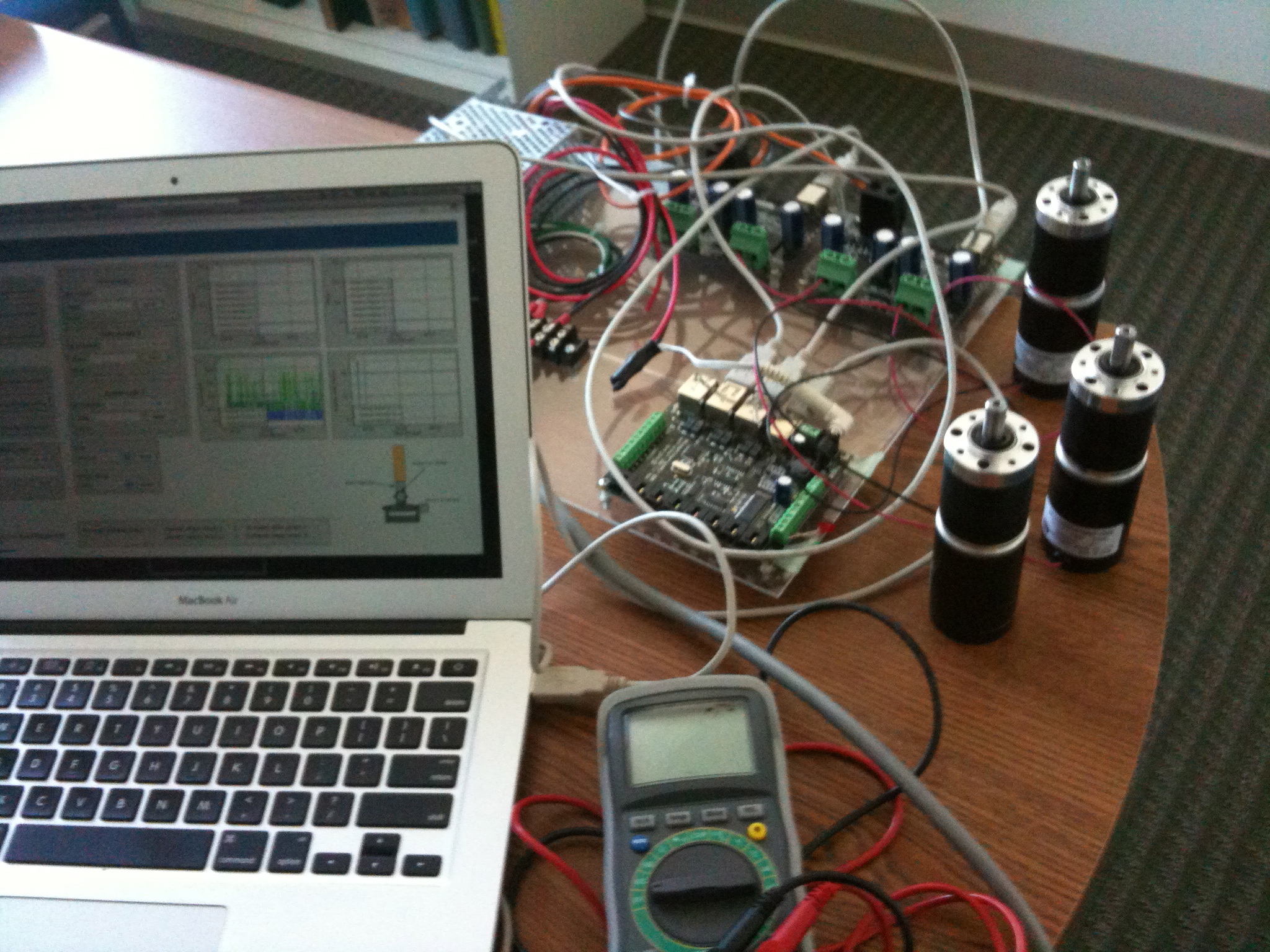
The electronics assembly for the CubeSat test rig was completed. It consists of 3 DC gear motors, one for each axis of the 3-axis test rig. The motors are connected to Phidgets motor boards which are connected to a Phidgets interface board and hub. The hub is connected to MacBook Air running VisualCommander which hosts the interface and control software for the board. The interface software allows direct velocity and acceleration control of the motors but also permits closed loop angle control using angle encoders.
We missed one meeting because of snow. The attitude control team is learning to program the flight software. They have been adding the magnetic torquer control system. This is a backup to the reaction wheels. On the recommendation of the team a third coil was added. Since these are air coils the mass penalty was minimal.
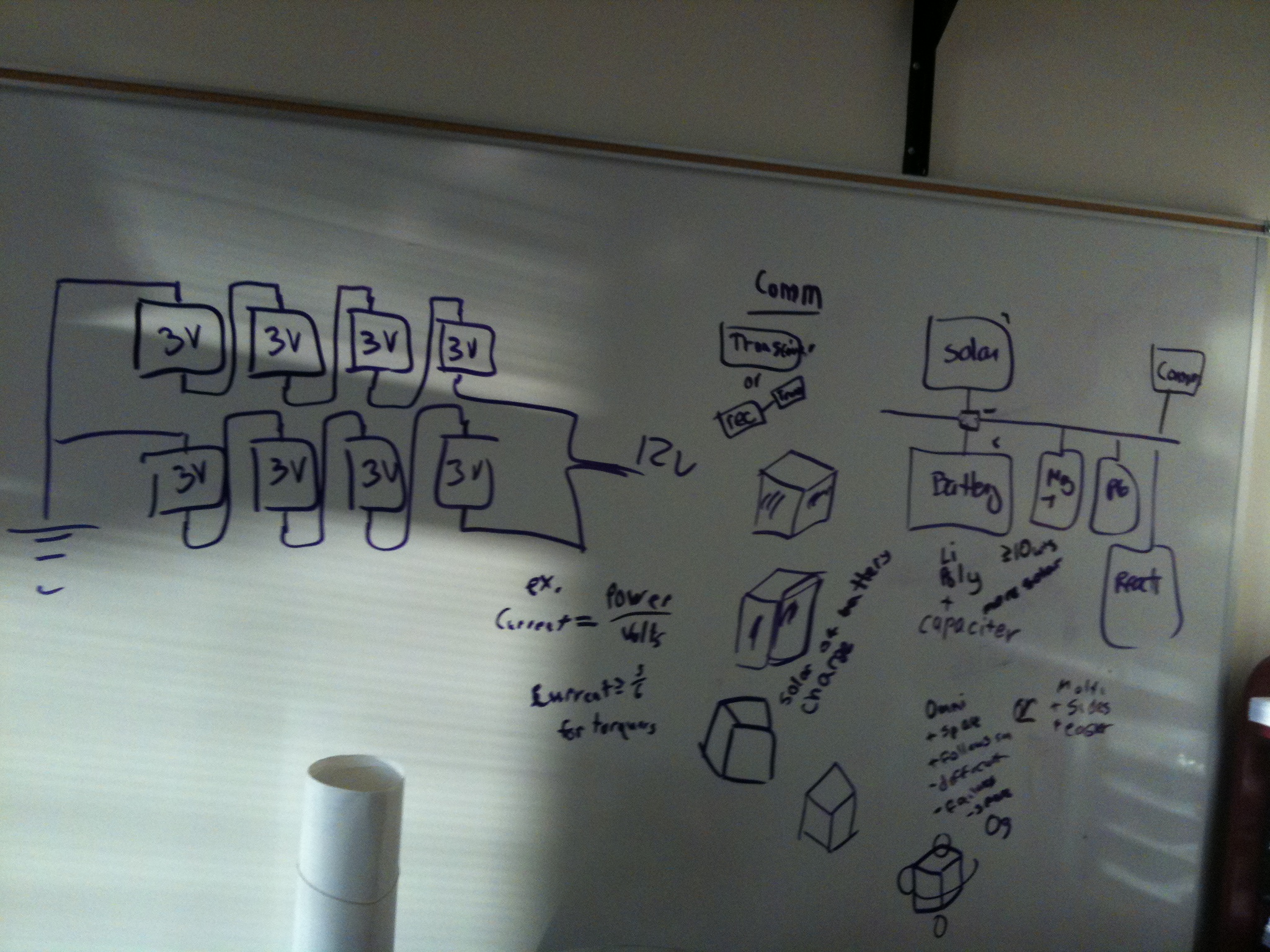
The power group worked on understanding how the battery charger chip worked. They obtained a test board from TI. Next week they plan to hook in the solar panels. They decided to run an 8 V bus. That means pairs of solar panels in series and the four strings in parallel. One panel on the +Z end is connected in series with one panel on the -Z end.
The link ground learned the mathematics of link budgets. The 8th grader on the team explained the link budget equations. He had to figure out decibels first!
The structures group worked with Eloisa to learn how to use NX, the CAD package the team will use. Eloisa is building the CubeSat structure in the Princeton MAE machine shop.
The test group familiarized themselves with the motors that will drive the test rig. Next week they will hook up all the electronics and test closed loop control.
The students divided into subsystems and began working on their subsystem tasks. Either a PSS engineer or John Witherspoon Faculty member supervised each group. The testing group was supervised by Kathryn Vogel, an MIT extern, who is working with Princeton Satellite Systems during MIT's Independent Activities Period. She helped the students connect a DC motor that will be used to the drive the CubeSat moving base test rig. Kathryn is in the Biological Engineering Department at MIT.
The power group worked out some concepts on the white board!
The students worked on air core and steel core magnetic torquers. The students also selected the subsystem on which they want to work. Each student chose a friend with whom they wanted to work and gave us their first and second subsystem choices.



The students built an air core magnetic torquer and began designing the spacecraft magnetic torquers.
We discussed all of the components that go into a CubeSat and passed around some of our CubeSat hardware. This included a MEMS IMU, a camera and a GPS receiver. The students examined the imaging chip in the camera which we could relate to the digital cameras they have at home.
The students built two more magnetic torquers. The last torquer had a very uniform winding. Very good results after only four models!
The students continued testing the torquers. We used another Phone app which gave more consistent results. We measured the magnetic field as a function of position around the torquers. The students discovered that the torquers retained their dipole even after the current was removed. They also learned about measurement noise. To verify the measurments the students touched the torquer to feel the electromagnetic force.
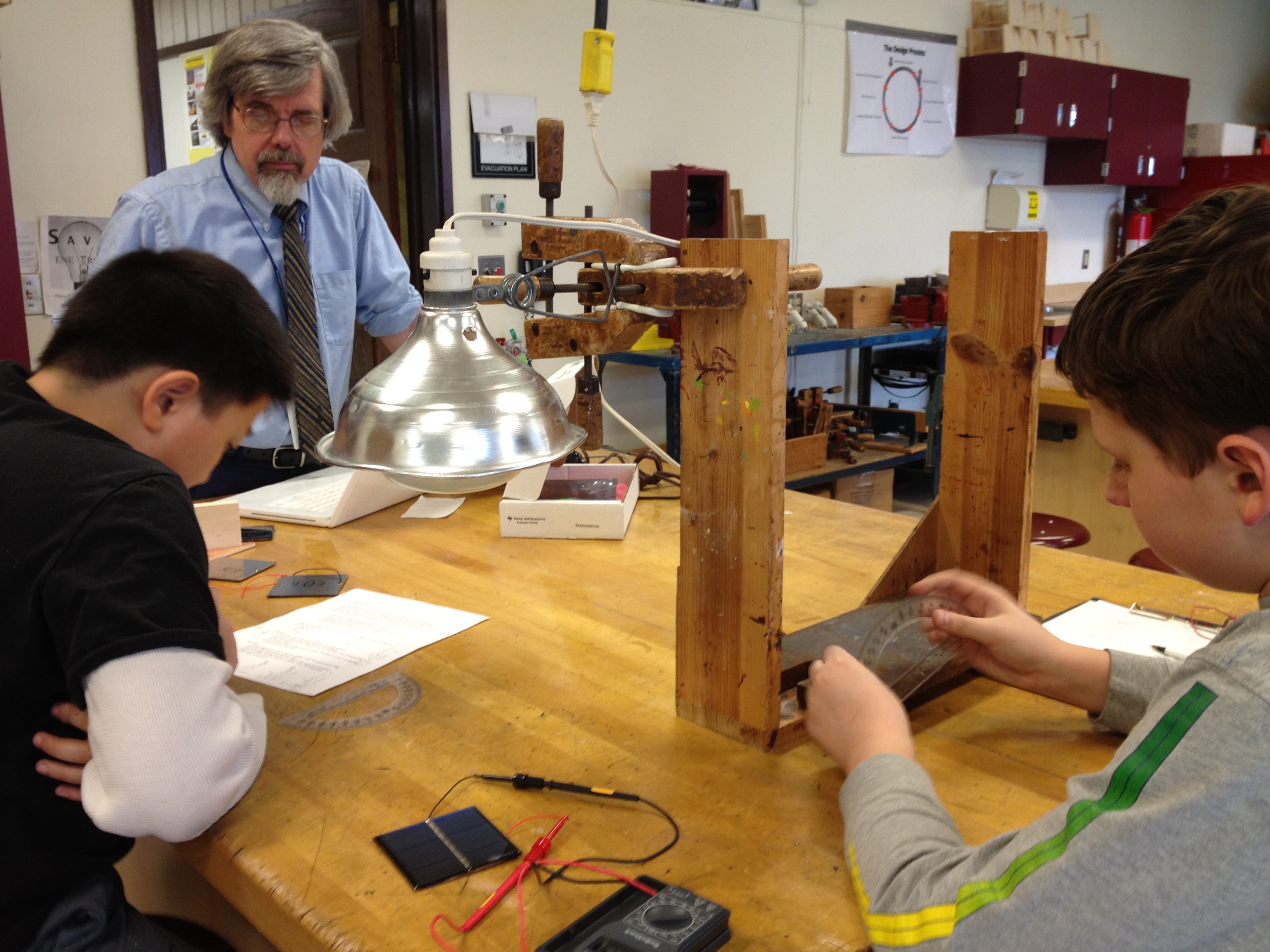
The lecture was on solar cells. Students tested the solar cells using light sources provide by Mr. Carson. They look at the effects of distance and incidence angle of the light. Students measured current and voltage and compared the results with the specifications.
The picture shows the light source, solar panel and voltmeter used for testing. The solar panel is about the right size but not efficient enough for our CubeSat.

The students built their first CubeSat component, a magnetic torquer. Mr. Skalka, the tech prep teacher, built a rig for winding the core. The students snapped the wire the first time they tried but then rewound the core without incident. The second team to build a torquer built it in 5 minutes! The wire was very fine so we removed the insulation by sanding the wire. The students tested the torquer using a magnetometer app on the iPhone written by David Hoerl a PSS software engineer. We also went over a MATLAB script for designing magnetic torquers.
One of the students built his own torquer coils at home which we also tested.
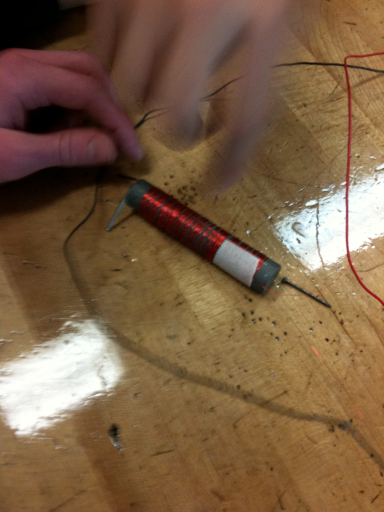
We reviewed orbit dynamics and began studying magnetic torquers. Magnetic torquers will be used to remove momentum from the CubeSat and as a backup to the reaction wheels for attitude control. We brought in the Hiperco-50 cores and the AWG 32 wire for the torquers. The John Witherspoon School tech prep teacher began the design of a rig to wrap the wire around the cores. Next week we plan to build the torquers and test them. An engineer at PSS is making an iPhone app that will measure the torquer's magnetic fields.
At the second meeting we reviewed vectors and learned how to compute orbital velocity.
The first meeting was held at John Witherspoon School in Mr. Carson's science classroom. 45 students attended ranging from 6th through 8th grade. We presented the following slides.
Eloisa passed around a balsa wood model she made of a 3U CubeSat. The students asked many good questions. We worked through the concept of a vector and everyone ended the meeting with a pretty good understanding of the material.
Photos from the first CubeSat Club meeting. The students learned about the spacecraft subsystems and are trying to decide which interests them the most! Eloisa de Castro led the meeting and was helped by Lew Meixler of PPPL and David Hoerl of PSS.


Students learned how to use MATLAB® to simulate a CubeSat. The simulation includes attitude dynamics, orbit dynamics, reaction wheel dynamics and a battery model. They also learned how the payload electronics will be connected together.
Lew Meixler explains the payload electronics. David Hoerl explained basic electronics.

This document shows a MATLAB script for simulating a CubeSat.
Simulating a CubeSat with MATLAB.
The students learned how to use SolidWorks from Eloisa de Castro. This week they will review the NSF proposal.

The CubeSat simulation runs in VisualCommander. The following is a short movie of a re-orientation maneuver. Re-orientation means change the attitude of the satellite.
All of the math and physics we will learn will be collected in the CubeSat book. You can download the latest version here. This hasn't been update in awhile but we hope to update it soon!
The CubeSat Toolbox is a set of MATLAB functions and scripts for designing CubeSats! It is designed for college students and high school students with no background in spacecraft.
View the product CubeSat toolbox.
National Science Foundation CubesSat project.
For more information: CubeSat Club Inquiry