
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
This page presents a small reusable spacecraft capable of flying to an asteroid from low earth orbit, operating near the surface of the asteroid and returning samples to low earth orbit. The spacecraft is designed to visit near asteroids as far as 1.3 AU from the sun. The spacecraft employs an ion engine for low thrust escape from earth orbit and for rendezvous with near earth asteroids. The satellite is controlled with reaction wheels with HPGP thrusters for momentum control. Operations at the asteroid are performed using the HPGP thrusters for orbit control. A robot arm is used to sample to surface and to operate a variety of tools using a changeable end-effector. Reaction wheels, thrusters and robot arm joint motors are coordinated by the control system.
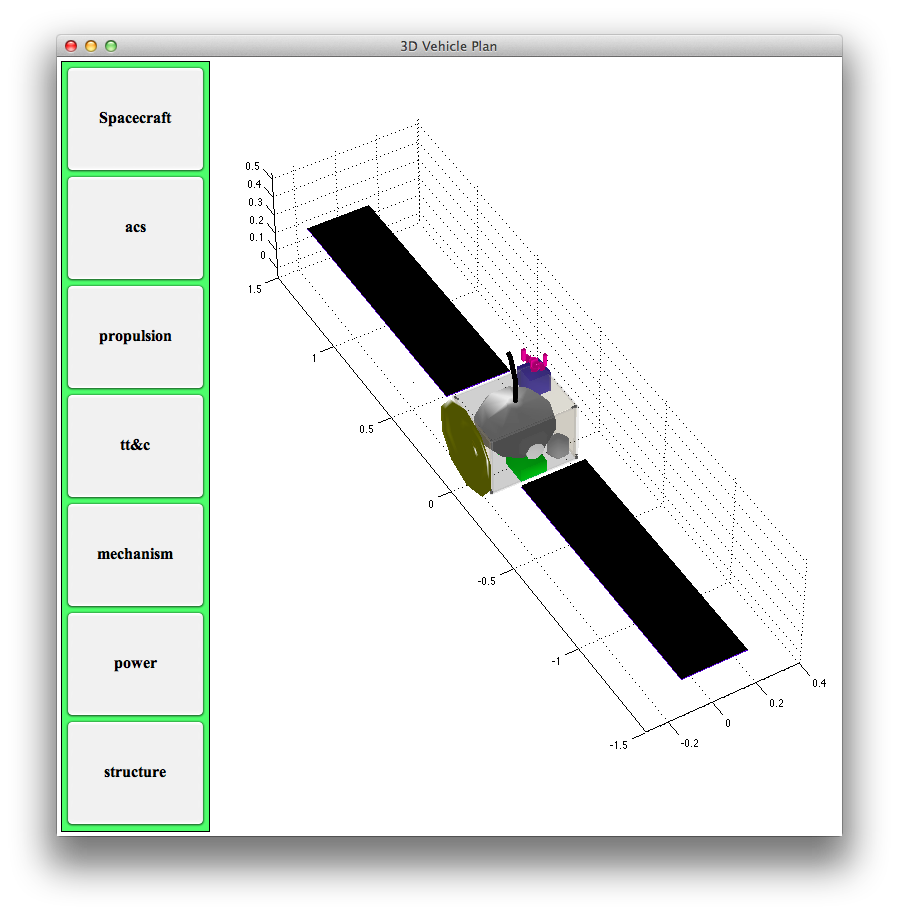
Princeton Satellite Systems is developing the guidance, navigation and control system as well as the flight software for the Asteroid Prospector satellite. The system will be based on the stationkeeping mode of the flight proven Indostar-1 attitude control system (ACS). The ACS will operate continuously from separation to the end of the mission. The system employs 3 orthogonal reaction wheels for control and six HPGP gas thrusters for momentum unloading. The chief disturbance during orbit transfer will be the misalignment of the engine thrust vector with respect to the spacecraft center of mass.
When operating near an asteroid position control will be done using the HPGP thrusters and the reaction wheels. These actuators are cooordinated with the robot arm which is used to explore the asteroid surface. The robot arm has a variety of end effectors that it can select. These include drills, cameras and a sample collection tool. A second arm may be flown to secure the spacecraft to the asteroid while running the geology experiments.
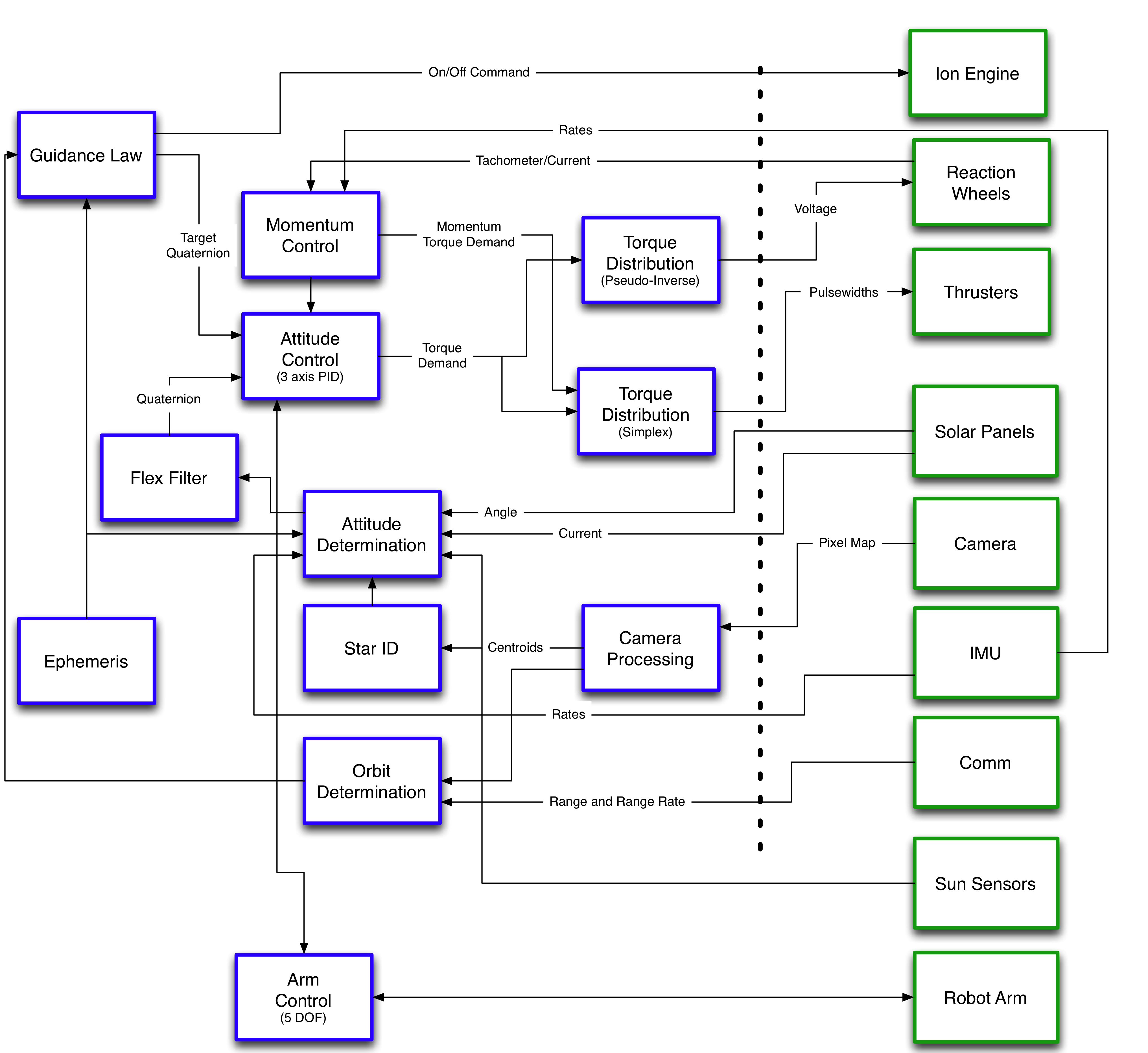
Attitude determination and navigation will be done using the Optical Navigation System (ONS). ONS will be used for absolute navigation during the flight from the earth to the asteroid and near asteroid operations. The articulared cameras can be used for surface inspection and coordinated with the robot arm.
The HPGP thrusters provide redundancy in case of a reaction wheel failure. The software automatically switches actuators if necessary.
The flight software will be implemented using the Princeton Satellite Systems ControlDeck class library. ControlDeck is an object-oriented asynchronous control system framework that was designed specifically to support multirate control systems.
The existing Core GN&C module library will be used to implement the control system. This is being used for an agile smallsat for a commercial customer. Core GN&C includes software modules for all subsystems.
For more information: Asteroid Prospector Inquiry