
|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
PRISMA is a technology demonstration mission developed by the OHB Sweden (formerly Swedish Space Corporation). The two-satellite mission was launched into a LEO orbit in 2010. The objective is to demonstrate sensor and propulsion technologies for the relative navigation, guidance and control of satellites for formation flying and rendezvous applications.
Princeton Satellite Systems provided consulting services to SSC during their mission design phase, and helped to develop formation guidance algorithms for their safe mode operation. The Formation Flying Module was used extensively to aid in the design of safe formations, the development of guidance algorithms, the modeling of disturbances, and the simulation of controlled relative orbits.
The idea of a "safe mode" for a formation of multiple spacecraft is a new concept. The purpose of the "safe mode" is, in general, self-preservation. This mode of operation is designed to protect the spacecraft from damage and/or to preserve the unnecessary consumption of fuel, in the event of subsystem failures or off-nominal operating conditions. For single-spacecraft, this means shutting down most of its systems and awaiting further instructions from the ground. For a formation of multiple close-orbiting spacecraft, however, safety and self-preservation must surely include collision avoidance. Therefore, the spacecraft must continue to operate all subsystems required for relative navigation and relative orbit control whenever possible.
In formation flying missions, it is necessary to expand the view of "safe mode" to consider the safety of the entire formation. This means extending the fault management plan to include formation-level operations in addition to spacecraft-level operations. Through our work with SSC, we explored the problem of designing a formation-level fault management plan.
The specific problem we addressed was that of safe formation guidance between two spacecraft in close proximity, in response to a sensor failure / degraded navigation accuracy. Because the accuracy of the relative position / velocity estimate begins degrading with time, the primary objective is to maneuver to a "safe" passive formation as quickly as possible, with a secondary objective of minimizing the fuel usage for the maneuver.
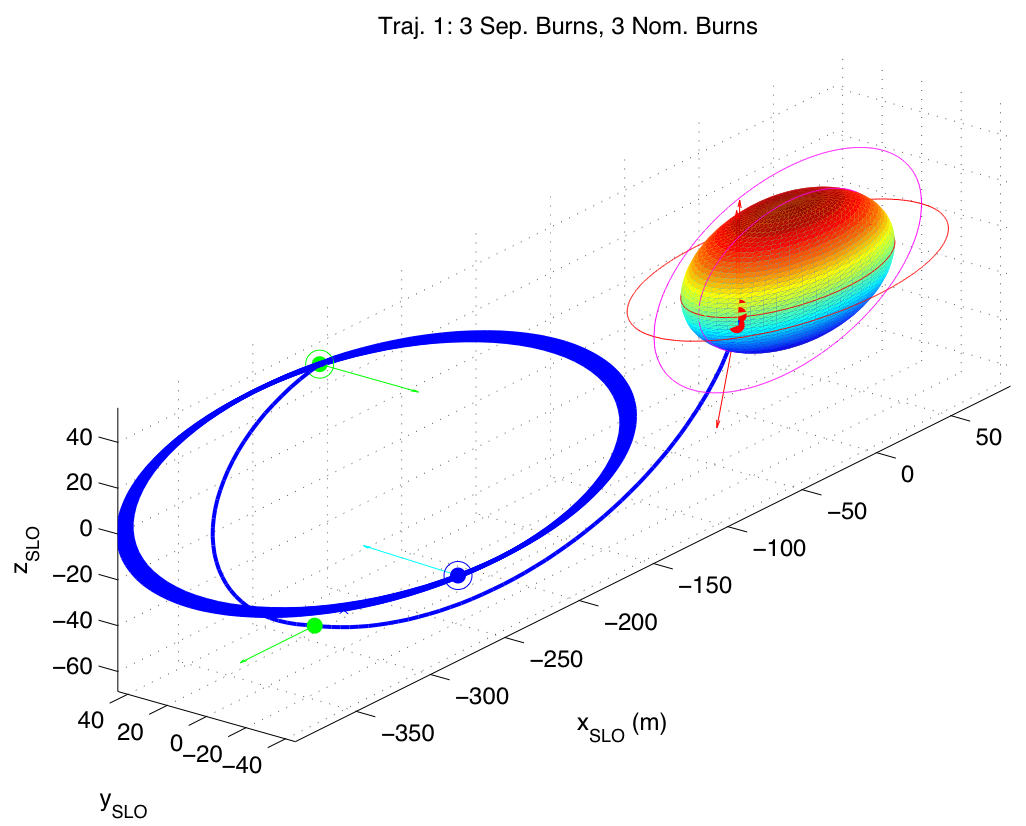
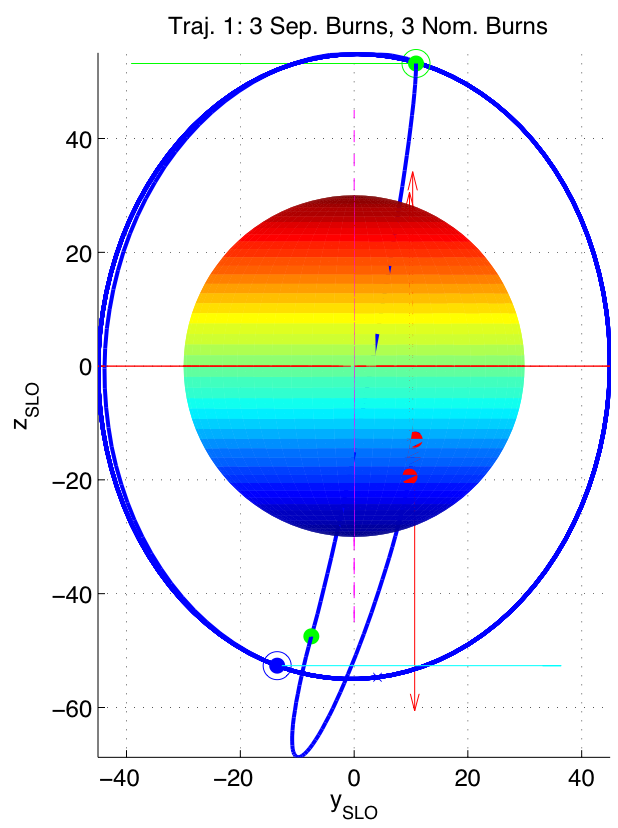
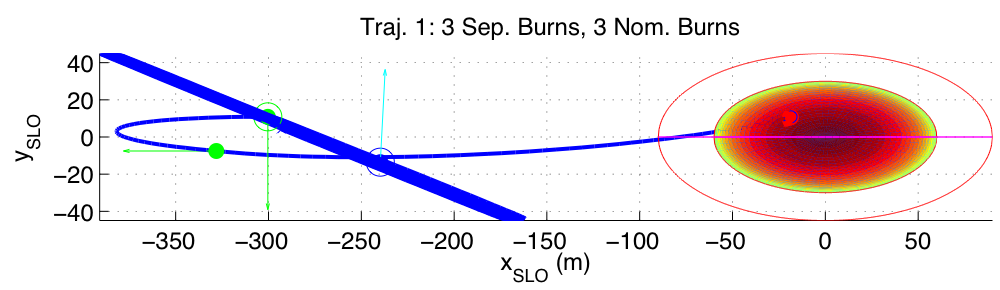
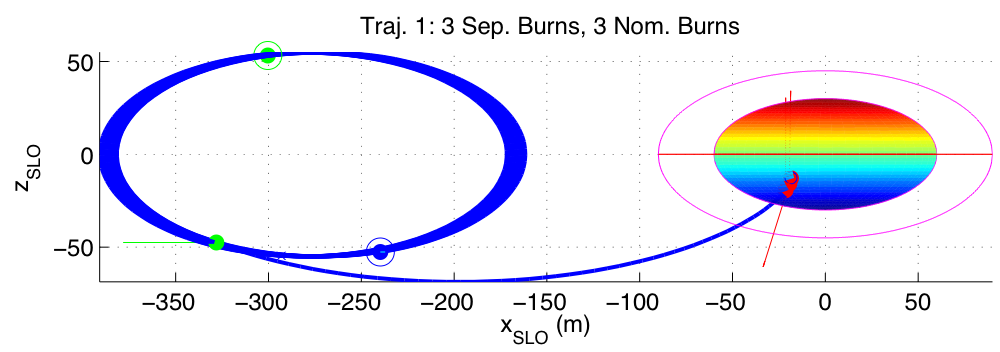
The images below illustrate the simulation results from an example maneuver. The ellipsoid represents a desired stay-out zone. The "safe mode" is entered when the spacecraft is inside this zone, which causes it to immediately maneuver away and enter a "safe" passive trajectory. The safe passive trajectory is designed to prevent future collisions without the need for subsequent orbit control.
The Formation Design GUI enables you to build up a cluster of spacecraft, organize the spacecraft into teams, and design the relative trajectories to achieve your desired formation geometry. You can save your work at any time, and load your saved formation data later to continue where you left off. The 3D viewer window lets you visualize and animate the trajectories in 3D as you go. You can also compute the minimum distance between all pairs of spacecraft with a click of the mouse.


The equations of relative motion are modeled for both circular and eccentric orbits. Use Hills equations, Lawdens equations, or Gauss' variational equations to simulate motion in the relative frame. Numerically integrate the equations with inputs for relative disturbances and controls. Use differfent simulation tools to simulate motion in the inertial or rotating relative frame. Use closed form solutions for Hills equations or Lawdens equations to quickly generate unforced trajectories from initial conditions.

Formation flying involves several spacecraft following passive relative trajectories in the local coordinate frame. These trajectories repeat once each orbit period, and in the absence of navigation uncertainty and disturbances, would require no control action to maintain. In formation flying missions, there are typically two types of maneuvers:



Formation Flying-related publications including PSS staff as authors are listed below.