|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
The estimation module provides you with all of the tools needed to perform orbit and attitude estimation, including stellar attitude determination. It allows you to design and test estimators in a matter of hours, not days or weeks. Changes are easy to make and you have excellent visibility into the resulting software. Prototyping your estimators will reduce both development time and cost.
The estimation module provides a comprehensive set of capabilities for designing orbit and attitude estimation systems including:
Stellar attitude determination employs star trackers and gyros to provide precise attitude information. The gyros provide rate information which is integrated to get the inertial attitude. The star trackers provide corrections to adjust for gyro noise. The model used in the Kalman Filter is a noise dynamics model of the gyros. The toolbox includes functions for attitude determi- nation with the star tracker alone, for the case where there are no gyros or the gyros are off-line. Key features are
The stellar attitude determination system has two modes of op- eration. The first is acquisition mode when the attitude uncertainty is large. The second is tracking mode when the uncertainty is small. The former mode uses intensity and pattern matching to identify stars which can then be tracked to provide bias corrections for the gyros. The system automatically switches modes as needed. The following figure shows the rapid convergence of the estimates for a gyro-based stellar attitude system.
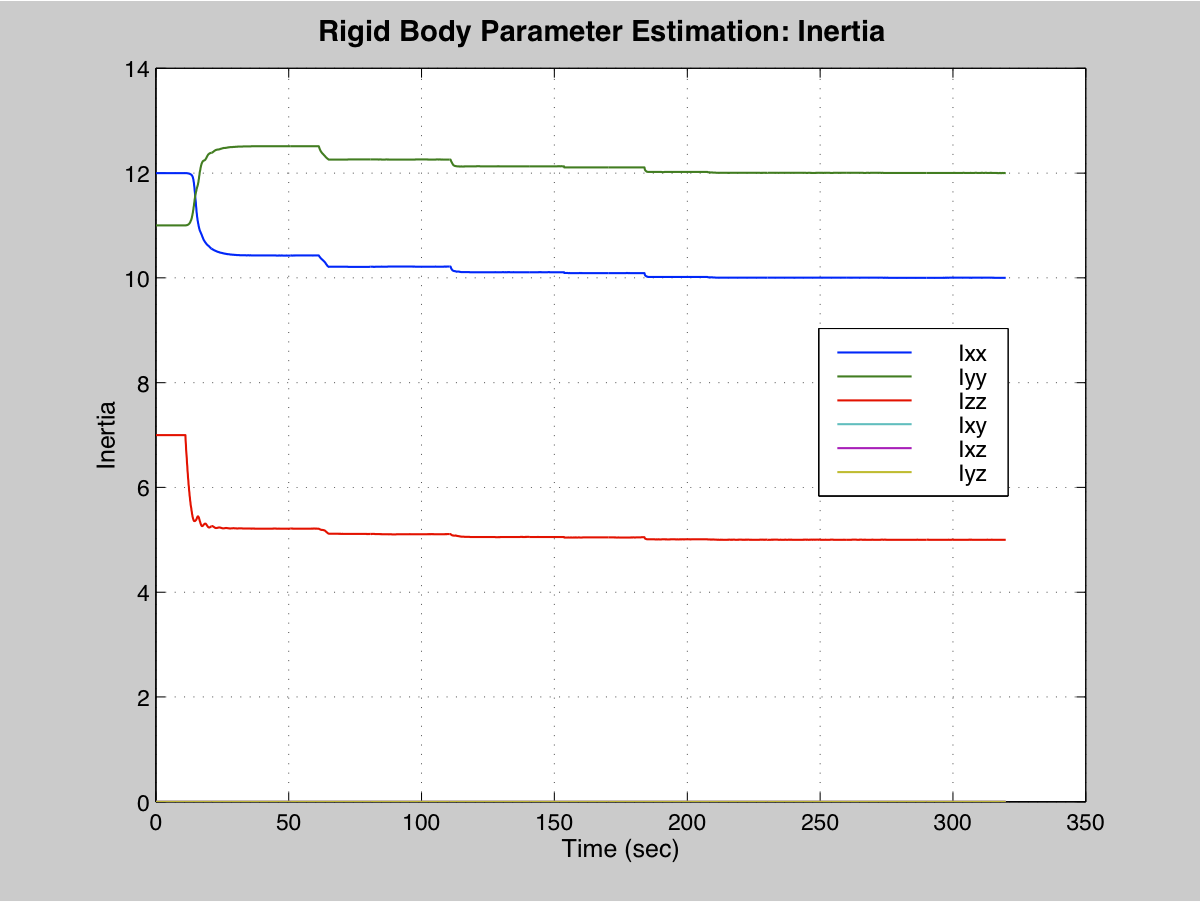
The module includes an Unscented Kalman filter designed for parameter identification. This filter can identify parameters for nonlinear systems. An example is the inertia matrix for a rigid body modeled using the nonlinear Euler equations. The filter accurately converges to the correct inertia matrix. This requires sufficient stimulation of the system, such as firing thrusters to provide acceleration, changing the body rates.