|
SUPPORT SITE |
|
|
|
SUPPORT SITE |
|
Version 11 Release NotesVersion 11, released in May, 2013, includes 9 new demos and over 100 new functions. Some of the new features include:
(Click here for a complete list of newly added functions)
|

|
The following is a complete list of functions which have been added since Version 10.0
Common
Common/AtmosphericCalculations/JacchiaLineberry.m Common/CAD/GetCADVF.m Common/Demos/GeneralEstimation/IMMDemo.m Common/Demos/GeneralEstimation/UKFAndEKFNLSpring.m Common/General/MatrixCellTo3D.m Common/General/TreeDiagram.m Common/GeneralEstimation/CWPAModel.m Common/GeneralEstimation/EKFPredict.m Common/GeneralEstimation/EKFUpdate.m/a> Common/GeneralEstimation/FXNLSpring.m Common/GeneralEstimation/IMMPredict.m Common/GeneralEstimation/IMMUpdate.m Common/GeneralEstimation/KFPredict.m Common/GeneralEstimation/KFUpdate.m Common/GeneralEstimation/KalmanFilterCombine.m Common/GeneralEstimation/RTSS.m Common/GeneralEstimation/SigmaPointsChol.m Common/GeneralEstimation/UKFPredict.m Common/GeneralEstimation/UKFRTSS.m.m Common/GeneralEstimation/UKFUT.m Common/GeneralEstimation/UKFUpdate.m Common/GeneralEstimation/UKFWeight.m Common/Graphics/AddFillToPlots.m Common/Graphics/PlaybackControls.m Common/Graphics/PlotAngleRange.m Common/Interface/ReadCSVTable.m Common/Math/AngleSepFromRotation.m Common/Math/FindValidAngleRange.m Common/Math/InsideAngleRange.m Common/Math/LinearSinCosToQuadCos.m Common/Math/MergeAngleRange.m Common/Math/PointInGridInTriangle.m/a> Common/Math/PointInTriangle.m Common/Math/SectorPatch.m Common/Math/SolveLinearSinCos.m Common/Probability/NormalDistribution.m Common/Probability/RandP.m Common/Probability/RandPN.mEstimation
Estimation/Demos/OrbitEstimation/UKFComparison.m Estimation/Demos/OrbitEstimation/UnscentedKalmanSmootherDemo.m Estimation/OrbitEstimation/AngleSensor.m Estimation/OrbitEstimation/RHSX.mLink
Link/Radar/RadarPulseTrain.m Link/Radar/RadarThermalNoise.mOrbit
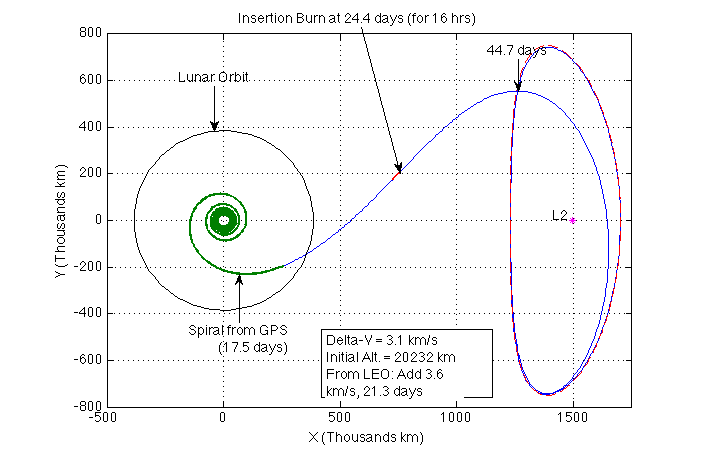
Orbit/Demos/OrbitMechanics/LEOToSunEarthL2Design.m Orbit/Demos/OrbitMechanics/RelativeOrbitSim.m Orbit/OrbitCoord/ECIToSunEarthRot.m Orbit/OrbitData/EarthMoonSystemConstants.m Orbit/OrbitData/SunEarthMoonSystemConstants.m Orbit/OrbitMechanics/CRTBPLinearSystem.m Orbit/OrbitMechanics/EclipticInjectionPlane.m Orbit/OrbitMechanics/HALOFamily.m Orbit/OrbitMechanics/HALOInit.m Orbit/OrbitMechanics/HALOState.m Orbit/OrbitMechanics/LTAN.m Orbit/OrbitMechanics/LyapunovFamily.m Orbit/OrbitMechanics/LyapunovInit.m Orbit/OrbitMechanics/RandomOrbit.m Orbit/OrbitMechanics/ShortArcToHills.m Orbit/OrbitMechanics/SunSyncNode.m Orbit/OrbitPropagator/DoubleIntegratorWithAccel.m Orbit/Visualization/HALOPlot.m Orbit/Visualization/L2OrbitPlots.m Orbit/Visualization/PlotEMTraj.m Orbit/Visualization/PlotSEMTraj.mSC
SC/Demos/Ephemeris/ExampleLEOAnalysis.m SC/Sensor/MeasAccel.m SC/Sensor/MeasEarthSensor.m SC/Sensor/MeasMagnetometerEarth.m SC/Sensor/MeasRateGyro.m SC/Sensor/MeasRateIntegratingGryo.m SC/Sensor/MeasRelativePosition.m SC/Sensor/MeasStarTracker.m SC/Sensor/MeasState.m SC/Sensor/MeasSunSensorAnalog.m SC/Sensor/MeasSunSensorDigital.mSCPro
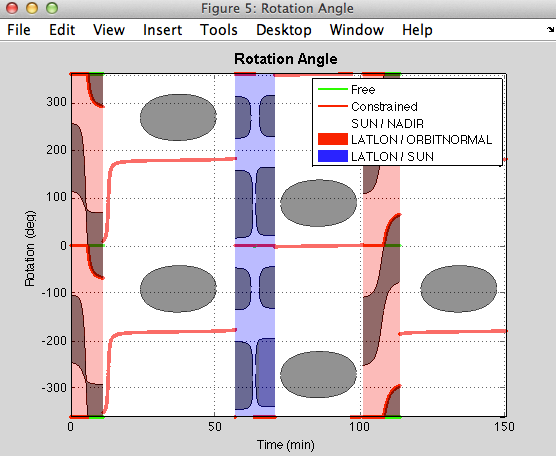
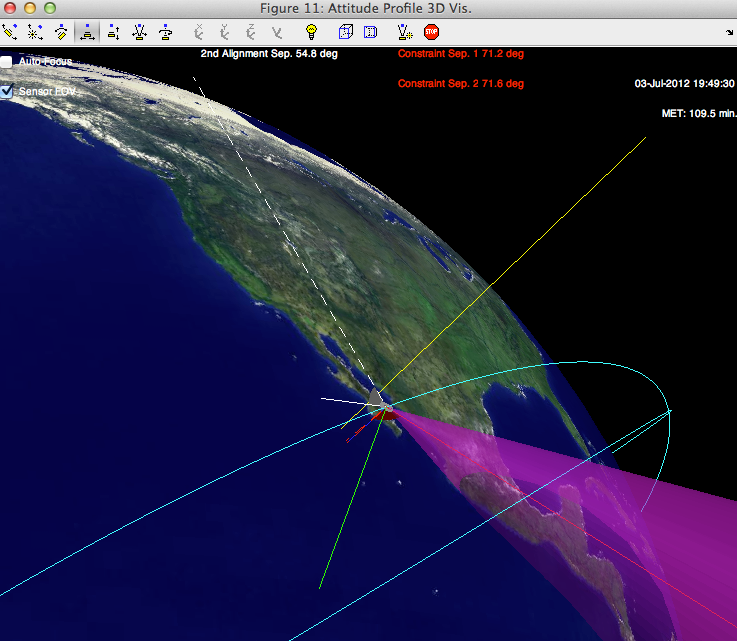
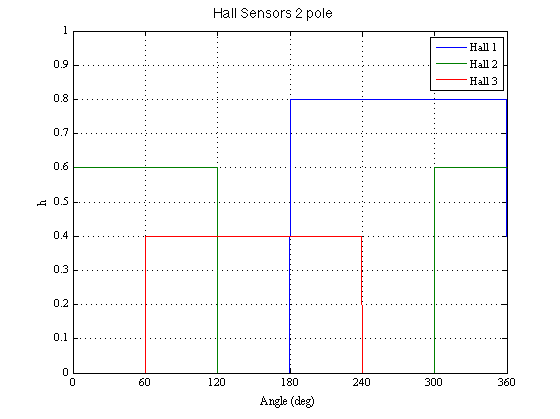
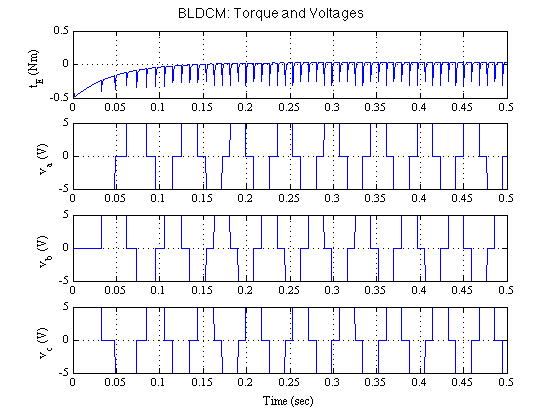
SCPro/Demos/ProActuators/BLDCMDemo.m SCPro/Demos/ProEphemeris/EclipseDurationSunSync.m SCPro/Optics/VMToPhotons.m SCPro/Optics/ZodiacalLight.m SCPro/ProActuators/BLDCMFlux.m SCPro/ProActuators/BLDCMFriction.m SCPro/ProActuators/BLDCMInverter.m SCPro/ProActuators/BLDCMRHS.m SCPro/ProAttitude/AttitudeProfilePlots.m SCPro/ProAttitude/AttitudeProfileVis.m SCPro/ProAttitude/QAlignWithCon.m SCPro/ProAttitude/QRotateToAlignWithCon.m SCPro/ProEnvirons/SolarFluxFromPlateECI.m SCPro/ProEphemeris/EarthEclipseDuration.m
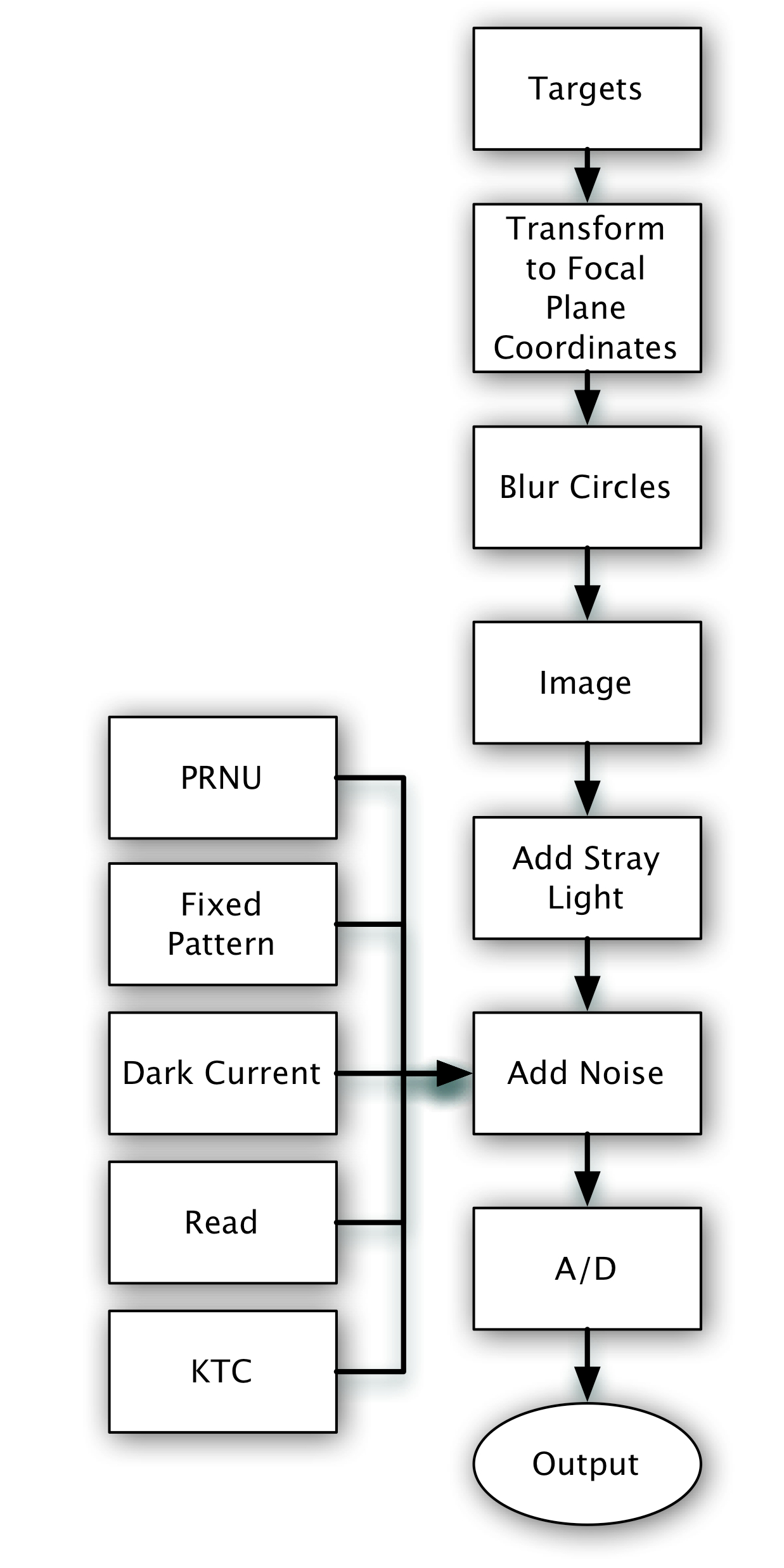
These functions moved to the Imaging module in a future release:
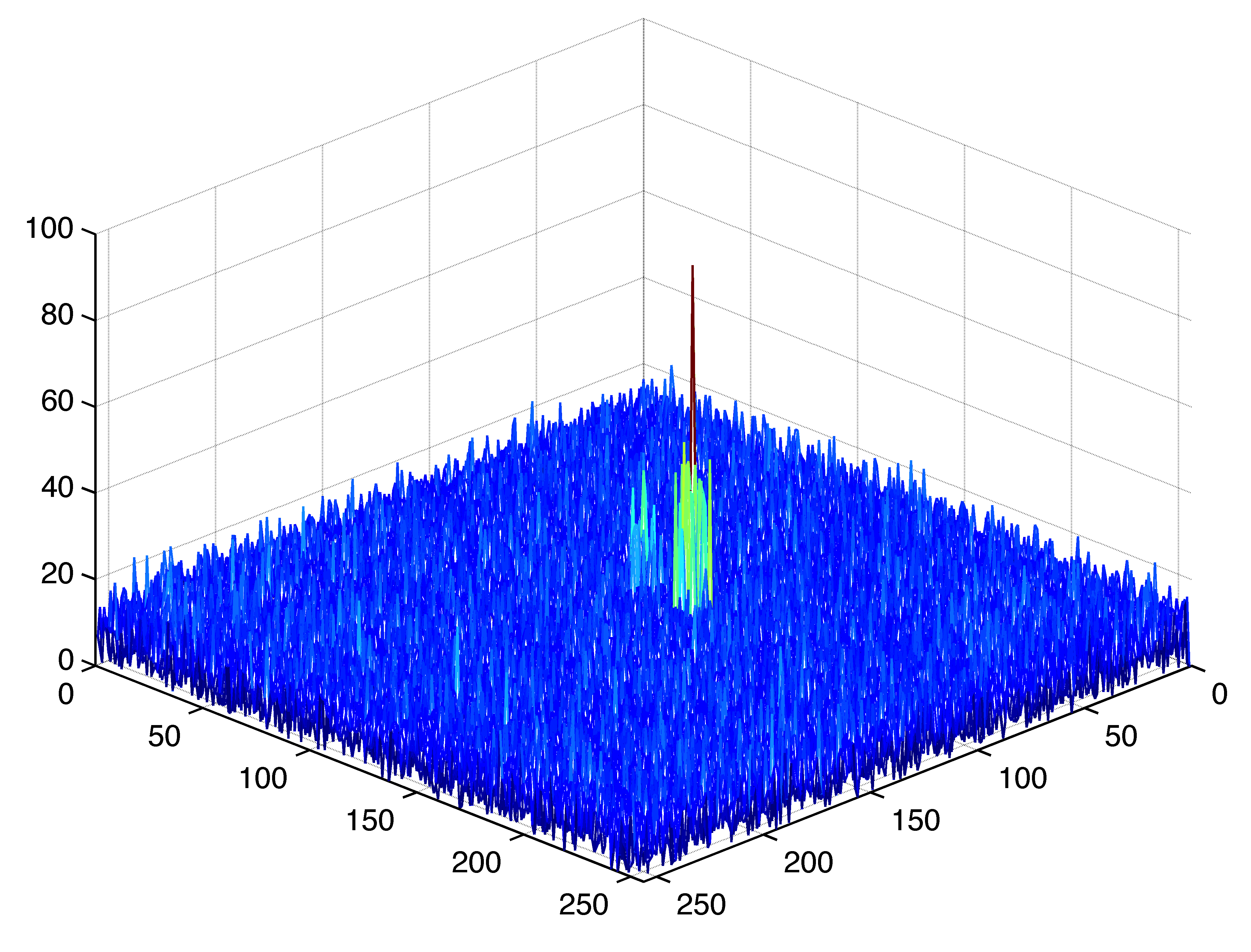
SCPro/Optics/AiryDefocused.m SCPro/Optics/AiryDiskInPixels.m SCPro/Optics/AlfvenSpeed.m SCPro/Optics/BlurParameter.m SCPro/Optics/Centroids.m SCPro/Optics/ConeAreaAndDerivatives.m SCPro/Optics/DetectorModel.m SCPro/Optics/ElectronsToIons.m SCPro/Optics/FocalPlaneImage.m SCPro/Optics/FresnelNumber.m SCPro/Optics/ImageCentroids.m SCPro/Optics/OpticalAngleError.m SCPro/Optics/OpticalNavAccuracy.m SCPro/Optics/PinholeCamera.m SCPro/Optics/PixelFlux2D.m SCPro/Optics/PolarStars.m SCPro/Optics/RMSNoiseImager.m SCPro/Optics/StarCentroid.m SCPro/Optics/StrehlRatio.m SCPro/Optics/TargetInFocalPlane.m SCPro/Optics/VM2Photons.m